I have a 50 kg coaxial octo bird drone and initially, I flew it using RF connection and Mavlink commands. In this flight, although there is still room for improvement regarding vibrations, I believe it’s acceptable.
https://review.px4.io/plot_app?log=5a7ab0fd-f7ac-4ba4-bbc1-ed1ccdf97a7f
Then, without changing anything in the PIDs and cutoff frequencies, I performed a flight 2 times with the RC transmitter to conduct autotune. However, my vibrations increased noticeably, and the stability of the drone changed. Oscillations were present in the drone.
https://review.px4.io/plot_app?log=4953635a-5107-47ff-9227-739bfc44ceff
https://review.px4.io/plot_app?log=dbd72fd5-ab99-4116-b58b-06b09c01eb0e
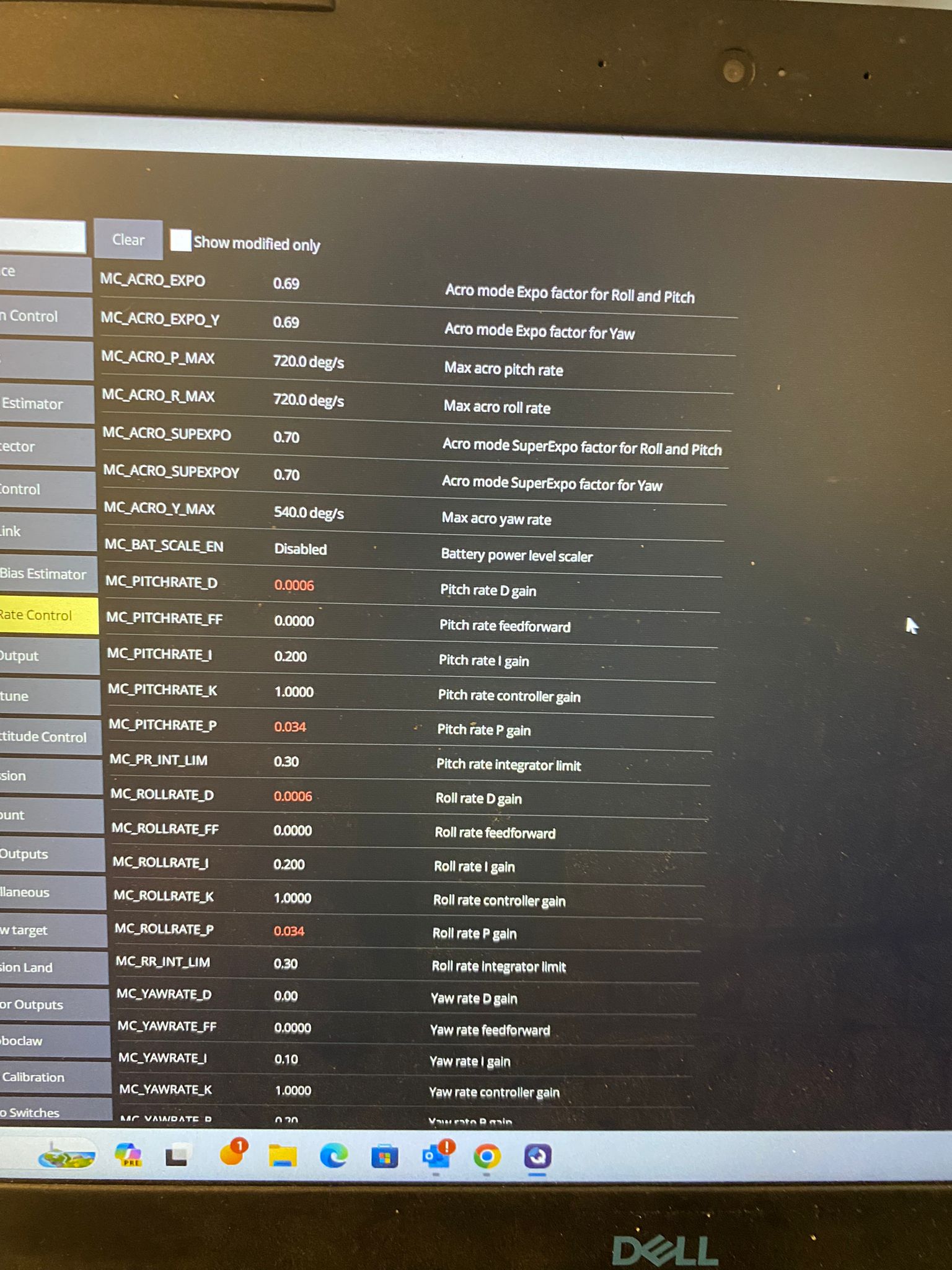
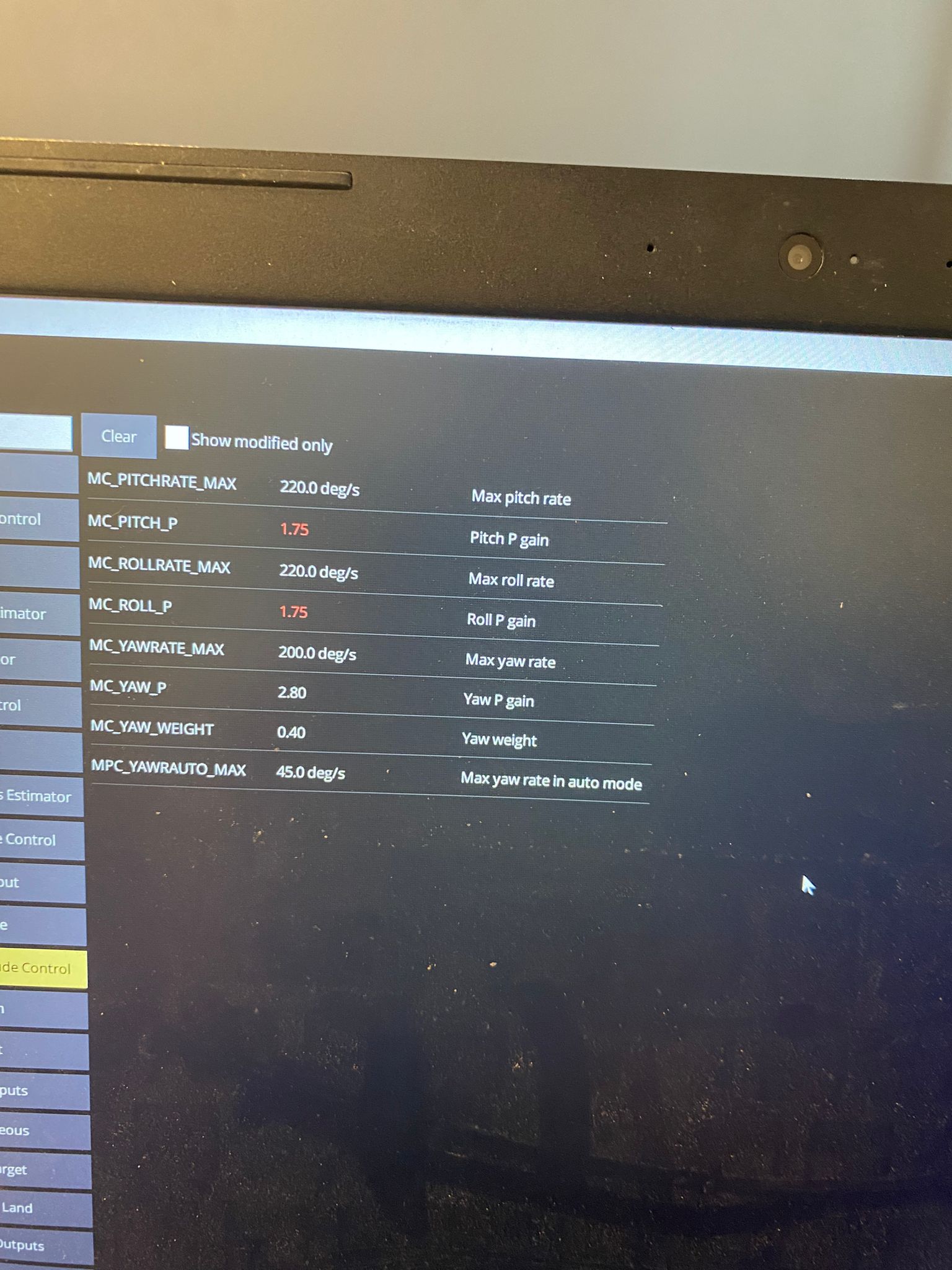
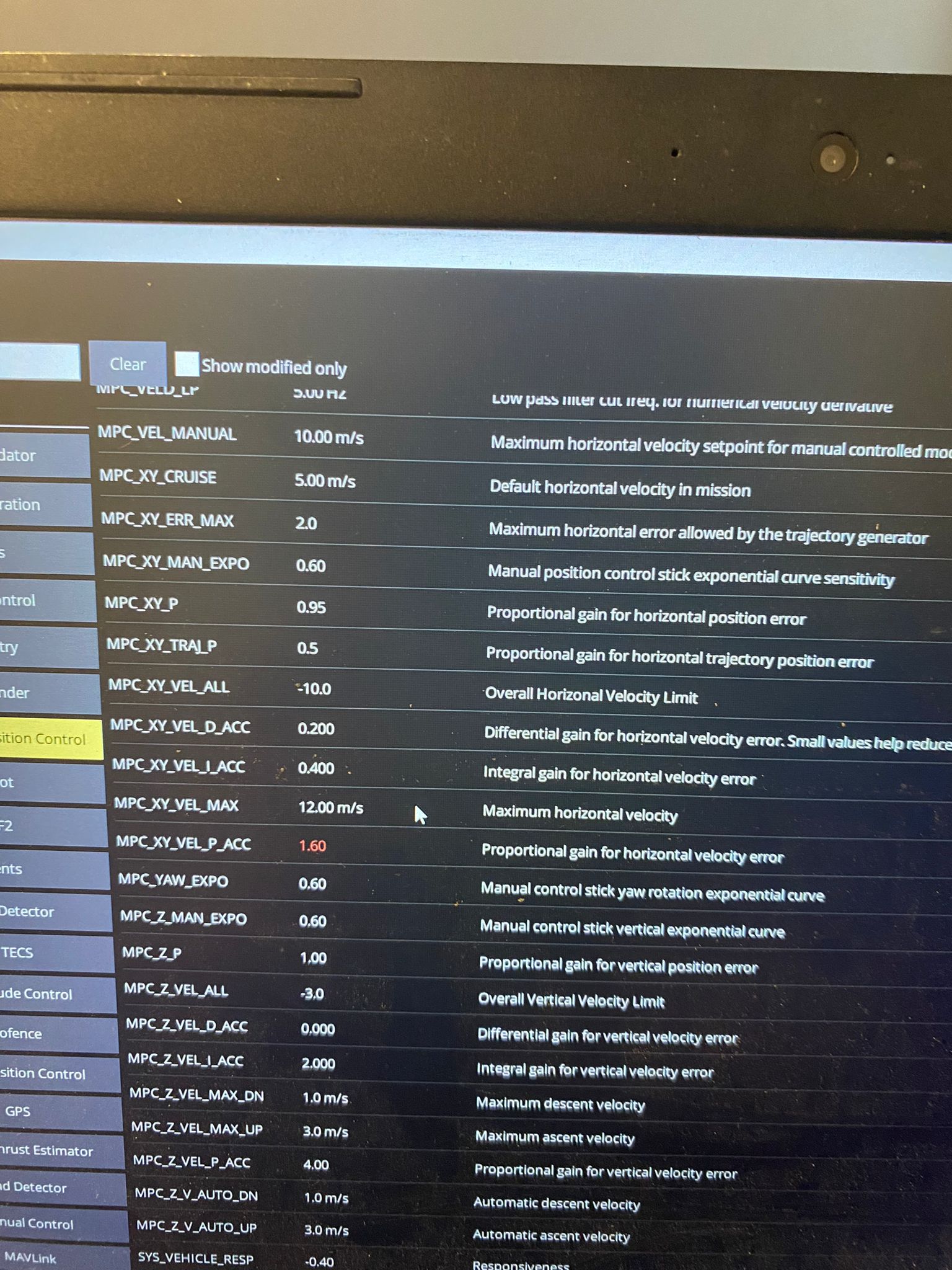
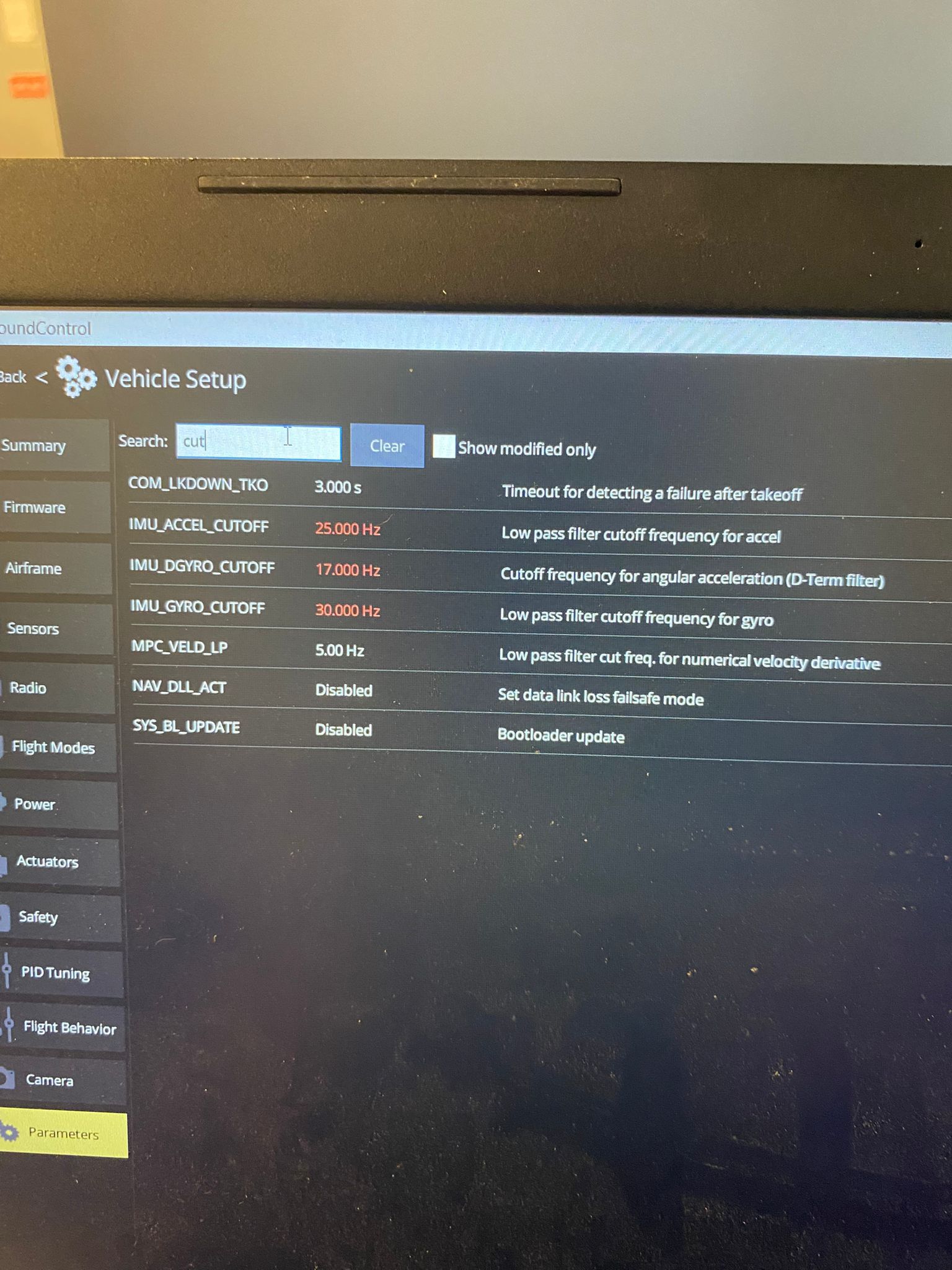
Is the reason for this difference between these two flights a mechanical difference that I couldn’t notice, or could there be another problem? How can I make the drone more stable with fewer vibrations? I await your valuable comments. By the way, I don’t believe autotune function works properly for this size of a drone. Twice, I manually set the PIDs and then started the autotune process. The results were different each time, completely different places. Therefore, I don’t think it’s correct. After conducting tests, my manually determined PIDs and cutoff frequencies are as follows : ( I flew with these values in all the flights in the logs I provided.)