Hi,
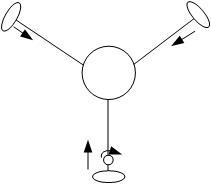
I’m working on a water vehicle that mostly looks like Y tricopter: it has tree motors and one servo. The main difference is that I don’t need roll and pitch stabilisation, so the motors with props installed 90 deg to the vehicle’s plane and provide trust for lateral and traverse control. Servo is used for yaw control.
Taking into account that I’m using PX4 flight stack, is it possible to define a mixer for this type of vehicle? For now I finished with using Y-tri-yaw+ mixer with switched off angle and angular rate controllers for pitch and roll. But I think it is not correct as the values in mixer file depend exactly on attitude (i.e pitch, roll, yaw) but I need only 2D linear movements, Any thoughts?