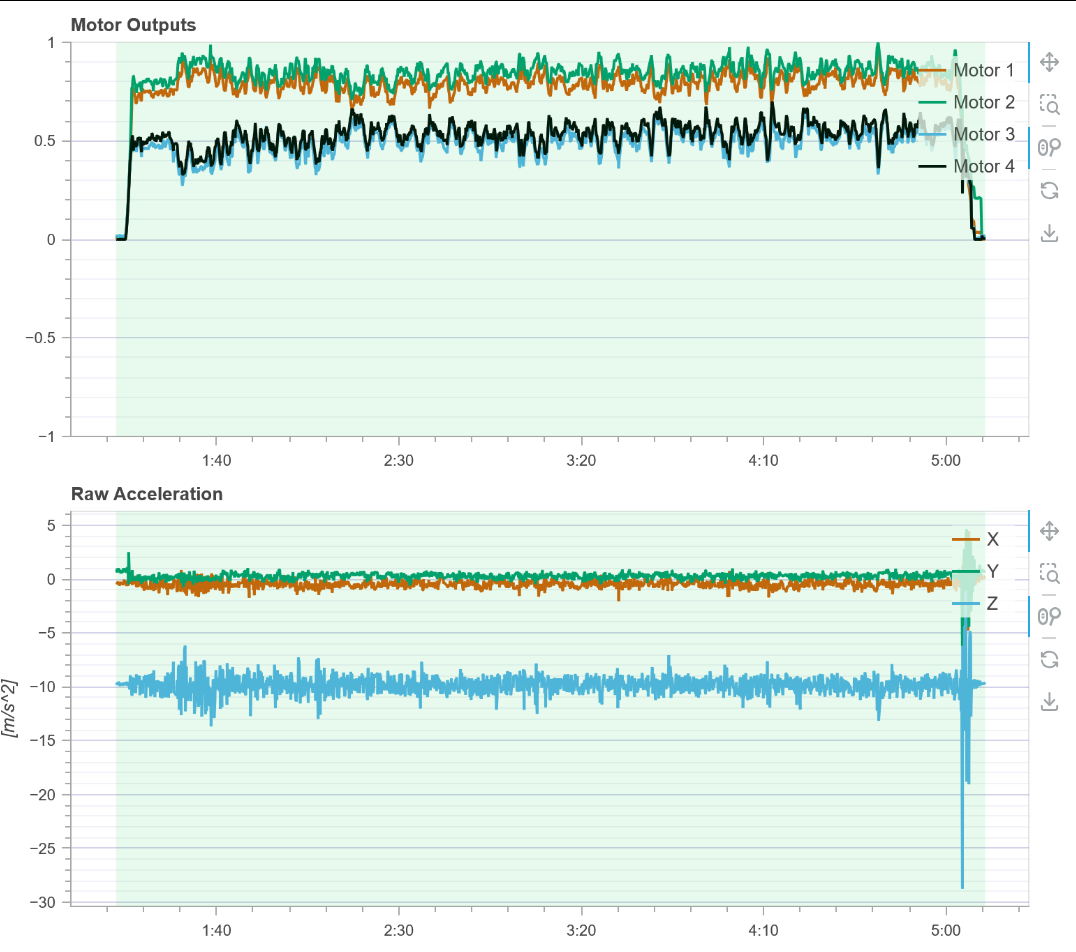
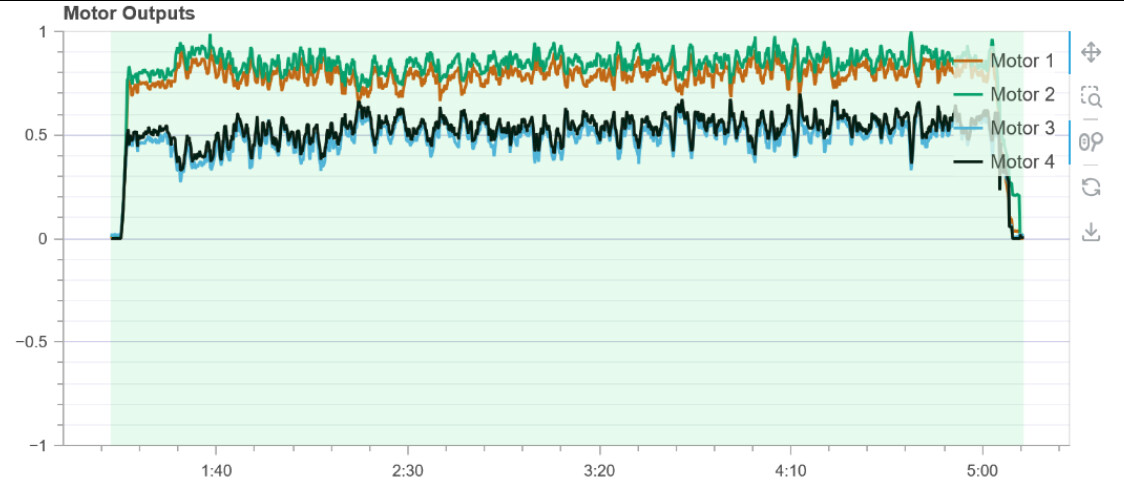
Two motors are much higher than the two other ones? Can you identify which ones and whether this is due to a yaw imbalance? Have you checked the motor axes and whether they are maybe tilted slightly one way?
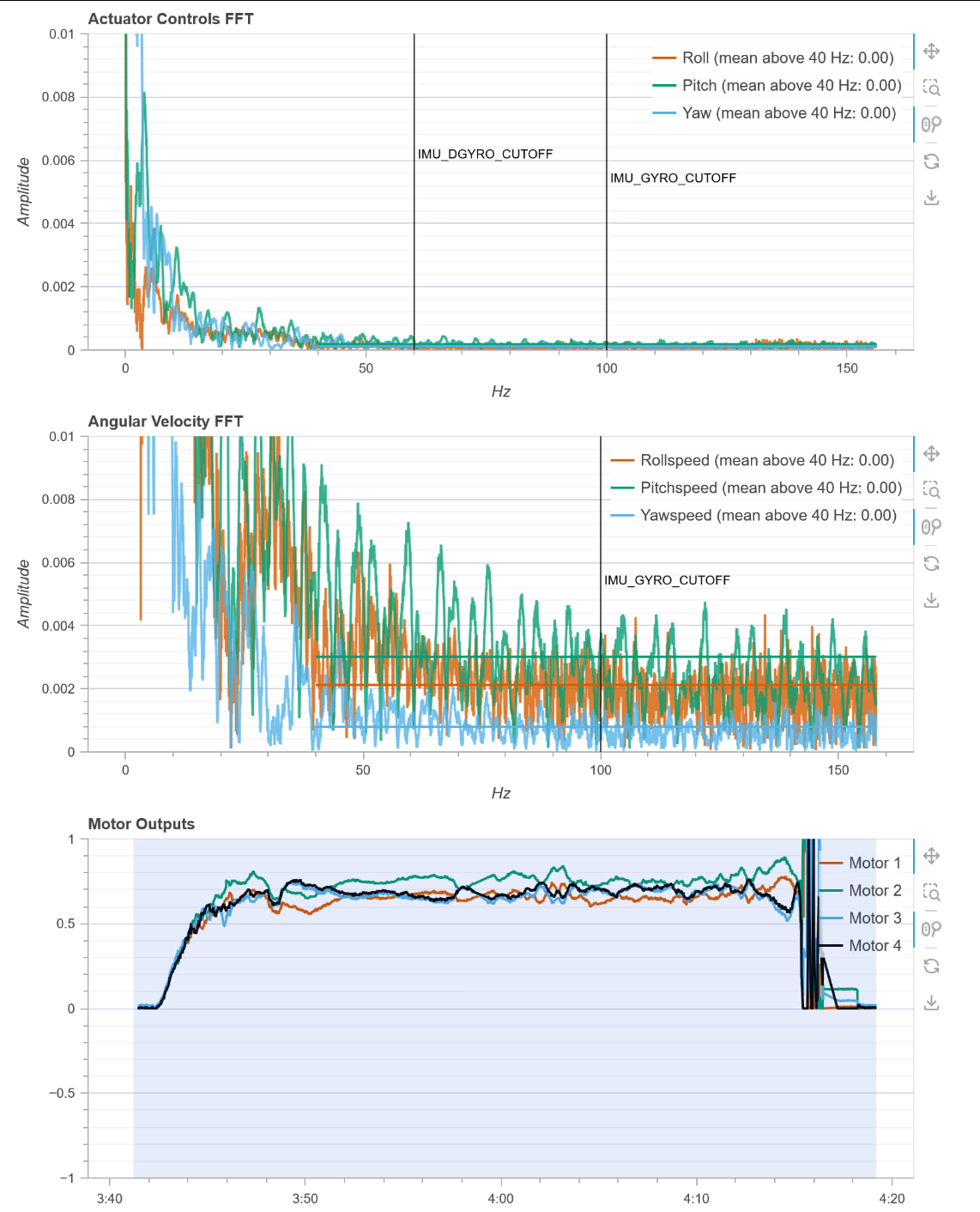
I optimized the installation of the damping balls (adjusting the verticality/parallelism of the fixing screws and replacing the damping balls with ones of different hardness), which had a significant impact on yaw. Now the inner-loop FFT looks acceptable, but after adding the outer-loop optical flow, I noticed it cannot hover properly. It still feels like there’s an issue somewhere. Could it be that the 3D-printed arms are not rigid enough?
@JulianOes Thanks, I have put the log in previous post.
Motors #3 and #4 are consistently on one side, while #1 and #2 are on the other side. The carbon frame follows the order #1, #3, #2, #4 and remains essentially level, with the sum of the power output of #1 and #3 basically equal to that of #2 and #4. I really can’t figure out what the issue is.
We are trying to troubleshoot an issue and identify its root cause. Could you suggest a clear direction or recommend effective methods for root cause analysis?
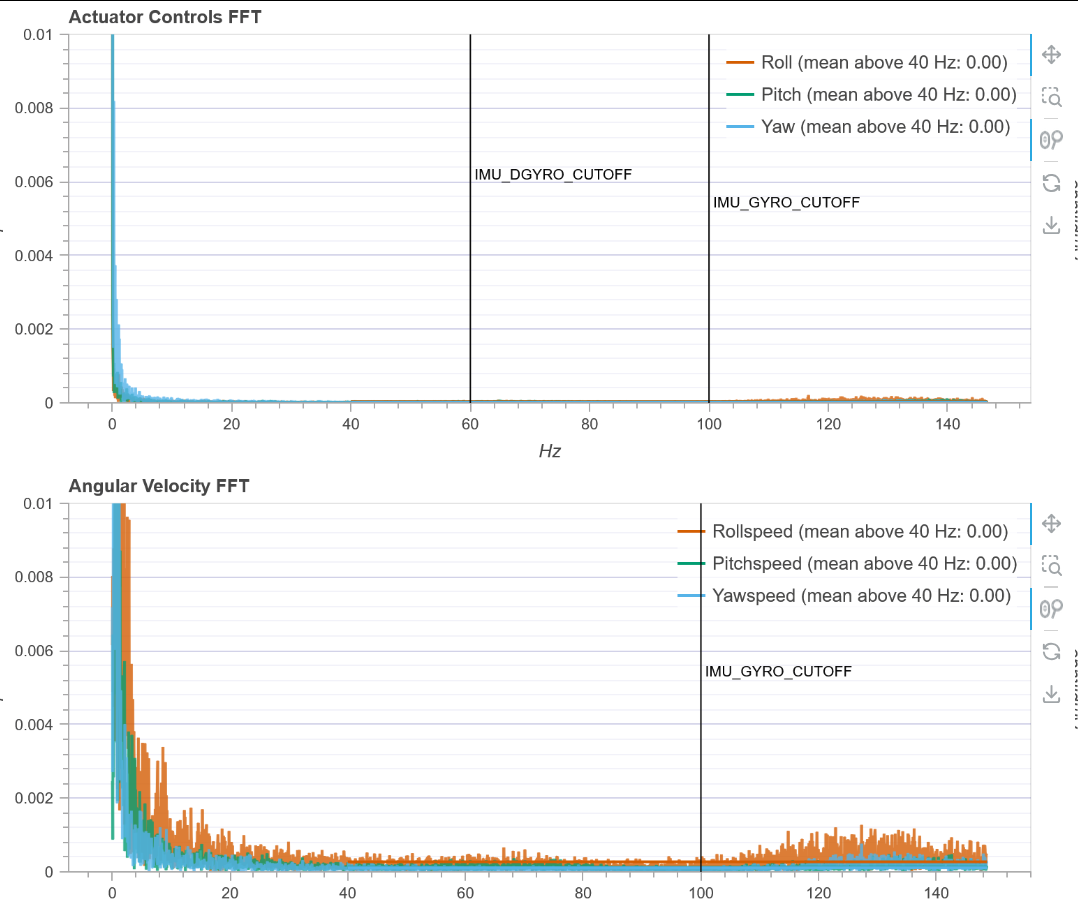
Thanks @JulianOes We’ve fixed some damping issues, and the yaw problem appears to be resolved. However, we are now seeing significant low-frequency resonance.