New developer here.
Follow the steps of DevGuide:https://dev.px4.io/en/setup/building_px4.html,now i successfully build px4fmu-v2_default and upload codes to flight control board.
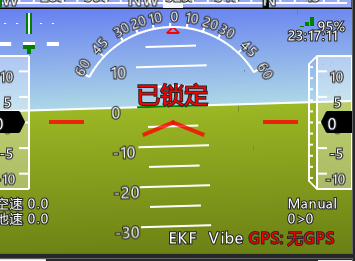
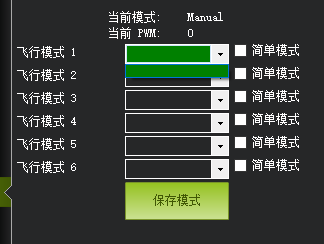
However,on mission planner it shows the pixhawk working on “manual” mode
Also, i can not set flightmode by mission planner
And i checked data output by pixhawk usb-serial, it seems pixhawk send quaterion over 10hz by mavlink? Here is a frame: FE 20 A7 01 01 1F BA 64 00 00 9B 1F 72 3F DF BA 65 3C 06 89 3C BC 26 05 A6 BE 20 9A 01 3A 00 D6 BD B9 F0 93 9F BA 9E 30
I wonder what should i do to make pixhawk work on “stablize”,“poshold” mode etc, and how to set mavlink for send heartbeat with 1hz?