Hello,
I am currently looking at the multicoper attitude controller in order to develop an attitude controller for the unmanned underwater vehicle (UUV). Therefore, I am using the gazebo SITL simulation.
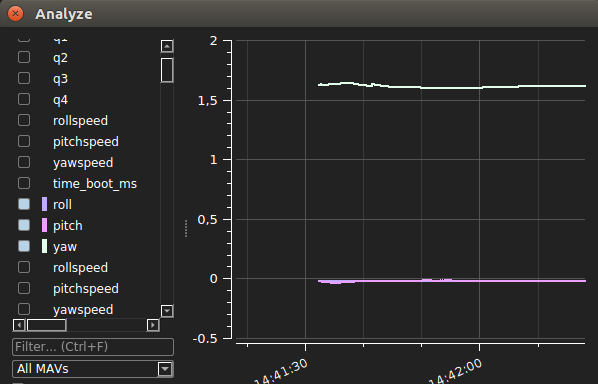
I noticed that there seems to be a yaw offset between gazebo and QGroundControl. When I spawn the model with the orientation (0, 0, 0) and look at the angles in QgroundControl there is an offset of about 1.6.
But this offset seems to be handled in the controller because when I publish attitude setpoints in offboard mode, the attidute (0, 0, 0) in gazebo corresponds to (0, 0, 1.57) in QgroundControl.
Does anyone know how this bias is handled in the mc_att_contol module?
Thanks in advance for your help.