Hi,
I am running two instances of EKF2. First with GPS_CTRL = 15, MAG_TYPE = 0, second with GPS_CTRL = 0 and, MAG_TYPE = 5. I modified the firmware to make sure that the second instance has no access whatsoever to GNSS, to prevent EKF-GSF fallback. When comparing yaw, to find yaw drift in time, I got this plot:
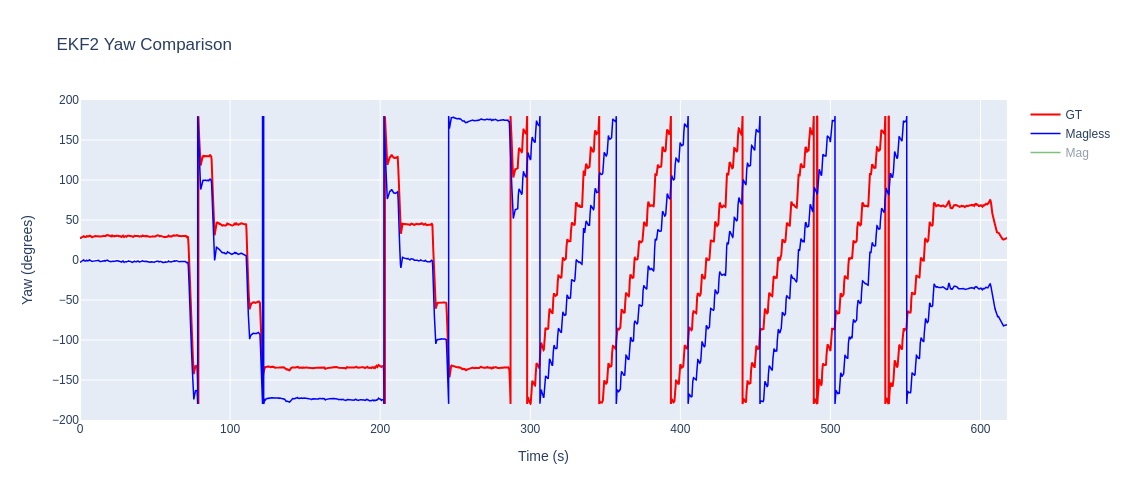
Maybe the issue is that without any MAG, the EKF2 still falls to EKF-GSF usage using maybe fake data? What is the best way to find out the EKF2 performance without MAG+GNSS? What might cause thes delay in the later stages of flight? (initially we see that regarding time, second instance is tracking well).