after reading the dev-guide of px4, i think in stablize, altitude and position mode, the joystick controls the yaw angle rate of multicopter.
yet today while i am flying my multicopter it did auto spin in stablize mode though i was not moving yaw joystick and then crashed.here is the flight log:https://logs.px4.io/plot_app?log=948eac53-3d72-4e13-a687-bf91235e8d4d
so i did a test without motors powered on. i made px4 armed and moved yaw stick, then disarm and checked the log. here it ishttps://logs.px4.io/plot_app?log=619654fd-8170-4c0b-93df-90ad96bca748
at 1:15 when joystick goes back to 0, yaw angrate sp does not go to 0, looks like the yaw angle rate setpoint does not follow the yaw joystick,so now i am confused about what in the hell yaw joystick controls.
joystick input:

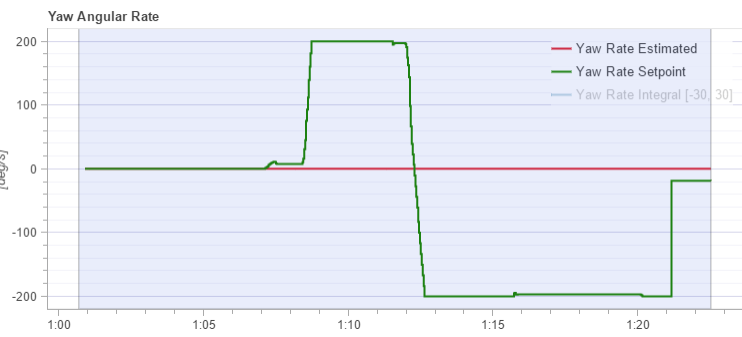
angle rate setpoint:
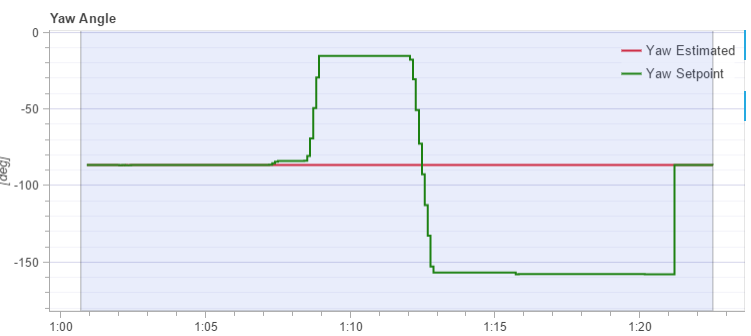
angle set point:
any discussion will be helpful!