Hi,
I’m using a Px4 mini with 1.9beta firmware. After the crash of my mc, I removed the propellers and after armed the drone I tried to pitch and roll in manual/stabilized and acro flight mode:
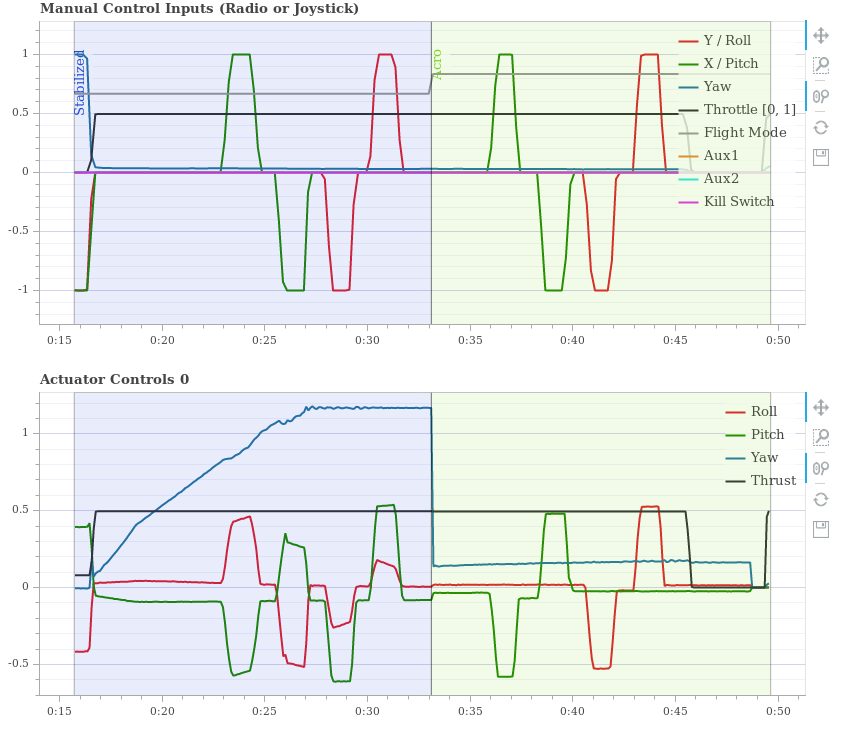
The flight review shows behavior that I’m not able to explain:
-
I never move the yaw stick so: why the yaw increase in manual/stabilized mode and falls down in acro?
-
Why in manual/stabilized mode actuator controls show pitch and roll together? In acro they are coherent with my input.
The full log at this link:
https://logs.px4.io/plot_app?log=4f1efcc6-acd5-4581-9624-1c9e893e7696
Can anyone help me to solve this puzzle?
Thanks
So in stabilized yaw is probably a bit off and the controller tries to counteract it. Since it can’t control it without propellers it’s trying harder and harder over time. This is called “integral” gain, so it’s the I part of the PID control.
In acro, it’s probably just trying to keep the yaw angular velocity at 0 but doesn’t try to reach a certain yaw angle and therefore it doesn’t need to integrate over time.
Hi JullianOes thanks, I understand your explanation about the yaw. But why do I see pitch and roll together while I moved only the pitch stick? The first spike in “Manual Control Input” is my input but in Actuator Controls there is as much roll than pitch. This behavior is visible only in stabilized mode.
I decided to test the MC without propellers because my first flight it was hard to control and it fell down: it started to turn around and I could not compensate it.
The MC_YAWRATE_I is 0.1 (default value)
Regards
So I think what happens is that the actuator controls are “turned by yaw” if that makes sense. So it applies your roll and pitch commands in the yaw frame that it wants to be in, rather than the current one.