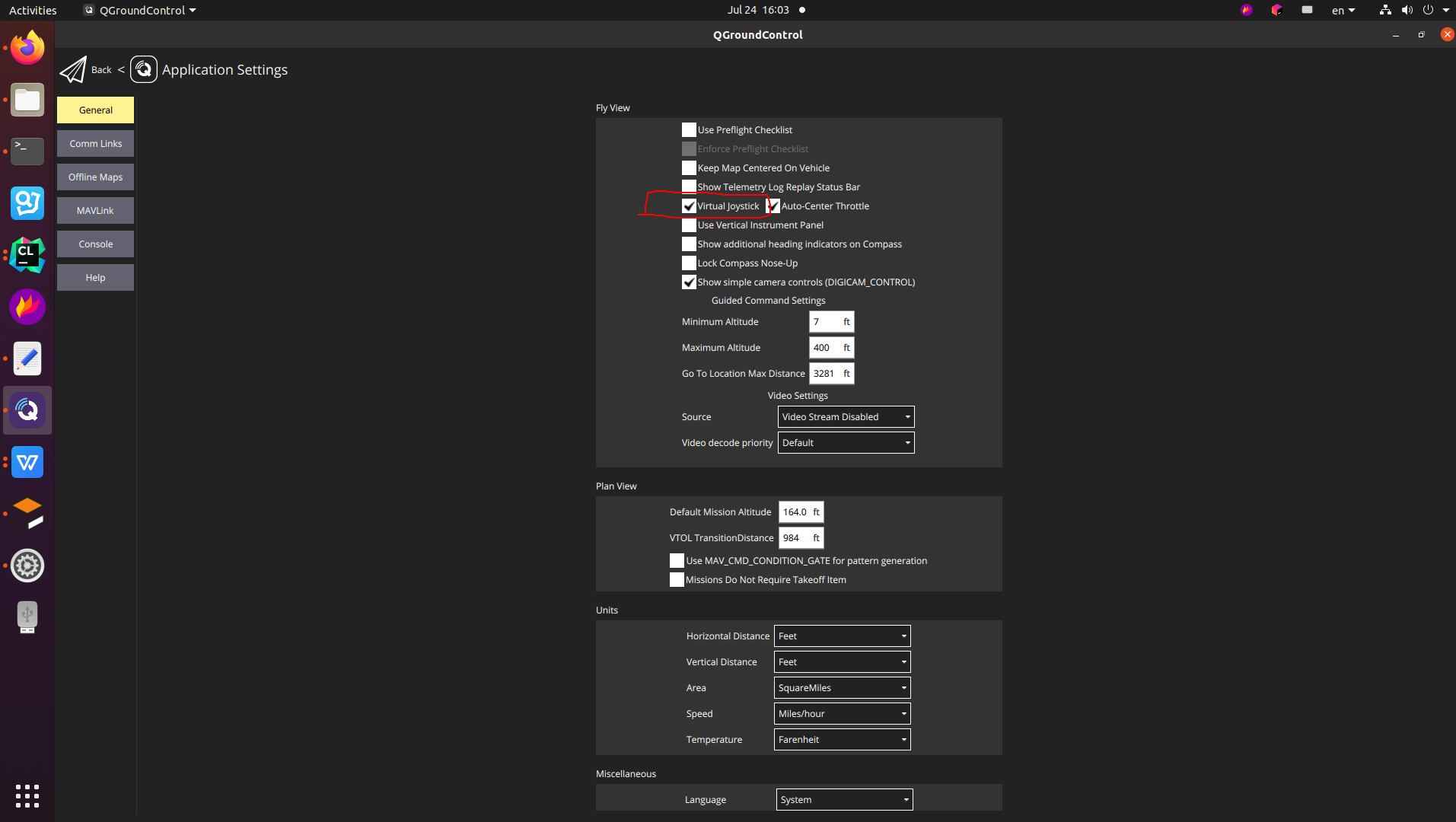
The iris can take off, but cannot switch to position mode.
QGroundControl version is v4.2.8
Computer is Ubuntu 20.04
Python 3.8.10
In the default environment, there is no any error.
but the QGroundControl is still not ready

There are five warning (can be excluded for the reason, because I tried another computer which QGroundControl can show Ready, the computer has the same five warnings)
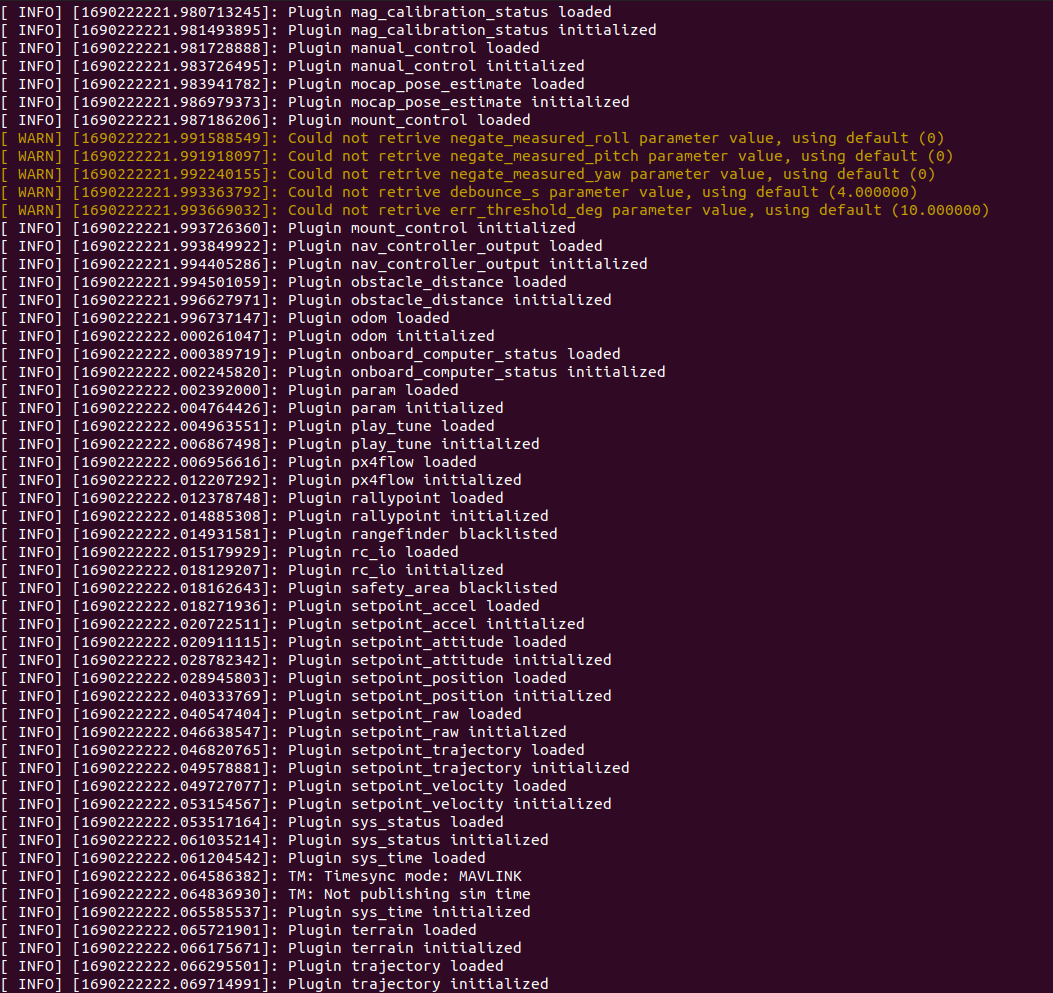
There is the log, (another computer which QGroundControl can show Ready)
The left side is the correct running (QGroundControl can show Ready)

I think that the possible reason is the “Warning [parser.cc:833] XML Attribute[version] in element[sdf] not defined in SDF, ignoring.” on the left side (QGroundControl can show Not Ready)