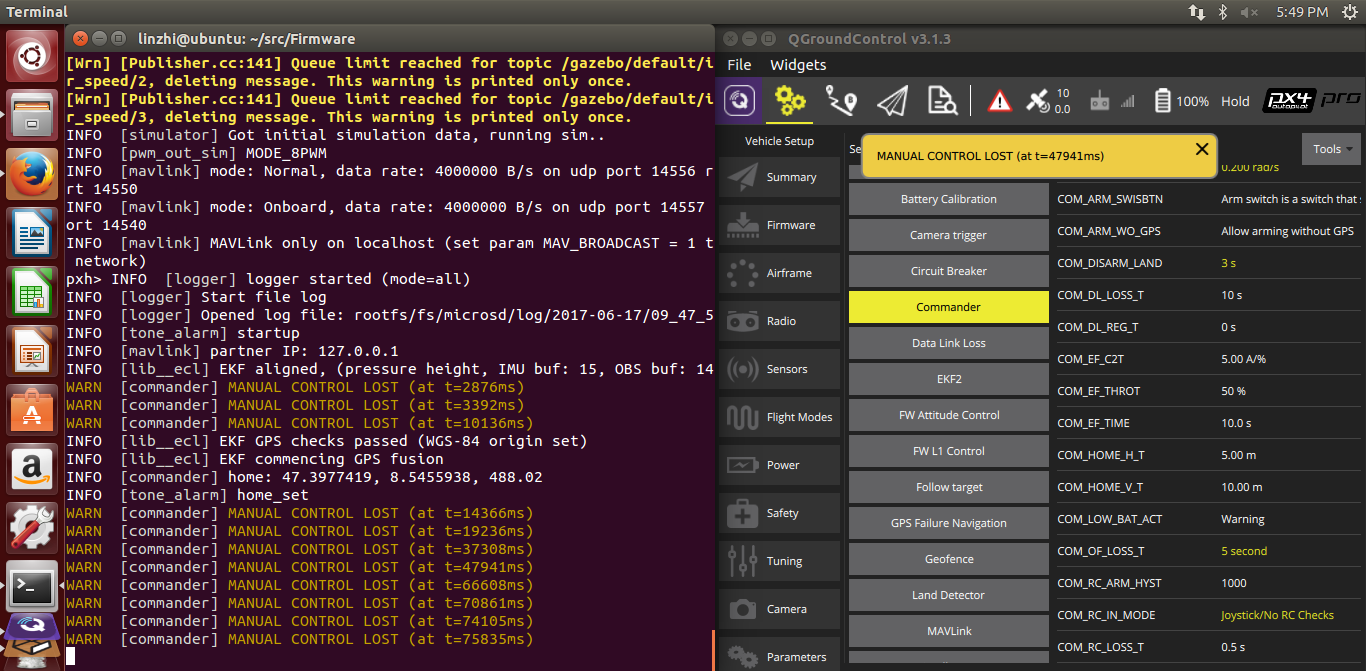
I’m using Qgroundcontrol 3.1.3 as my ground station and I want to use the virtual joystick without a real RC or joystick radio by setting COM_RC_IN_MODE to ‘Joystick/No RC Checks’. I can arm motors using the Qgroundcontrol software. However, an error message in my terminal as seen from the picture below kept appearing and I do not know how to solve this error. Also, I can’t seem to manually control my PX4 SITL drone using the virtual joysticks to. Also, many times, the error message ‘ERROR [sensors] Accel #0 fail: TOUT!’ and ‘ERROR [sensors] Gyro #0 fail: TOUT!’ appears constantly. Does anyone know how to solve this?