Hello,
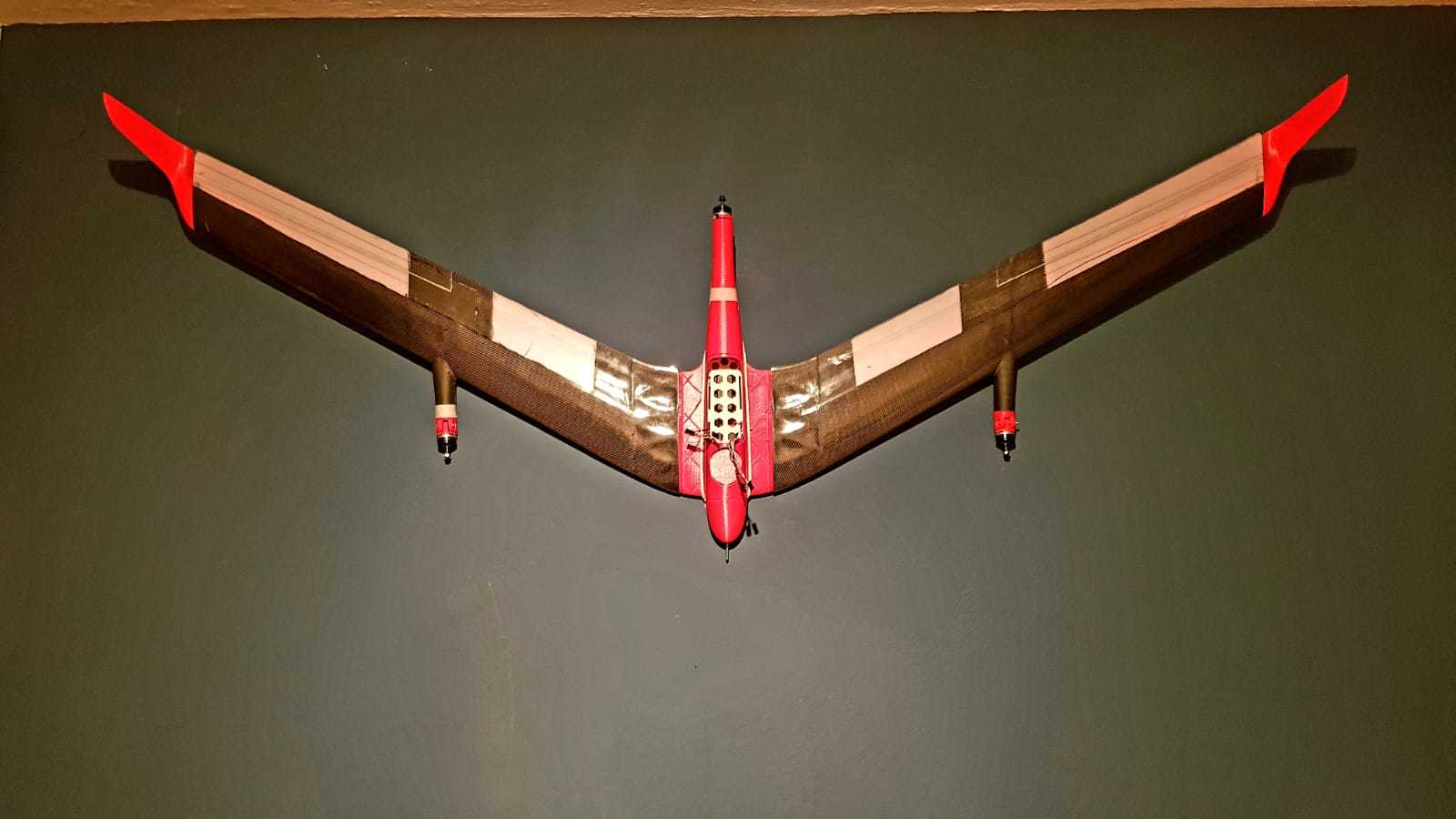
i build a VTOL in tricopter-wing configuration. Similar to the E-Flight Convergence but i can also tilt the rear motor. I used the convergence config and mixer file as a baseline and changed some parameters for my configuration. Everything seems to work alright for now. I managed to tune the PID’s to a point where it hovers quite stable. I hope to tune the PID’s for MC mode as well as possible before switching to transition tests. That’s where i have a small problem, since i am very inexperienced with PID tuning and hope someone could give me a few hints. I already read all the information about PID tuning i was able to find in the documentation.
To my problem:
I started with the eflight convergence PID’s wich did not work at all. My VTOL was just twitching around. After lowering the P values quite a bit and setting the D therms to 0 the VTOL hovers alright now, as can be seen in the attached log. Adding any D seems to induce oscillations, i read somewhere that this can happen with vibrations on the airframe. The P value is currently set to 0.05. That results in slight oscillations but the plane is quite maneuverable. Lowering the p therm to 0.045 got rid of the oscillations but the pitch axis got ‘very’ sluggish.
Attached are two links to previous logs:
4th flight: Flight Review
7th flight: Flight Review
Video of the 5th flight (i think):

Thanks in advance,
Thomas Leitgeb.