So I am trying to figure out how to fly multiple Yuneec Mantis G over WiFi using QGC but I have run into a few snags. Currently I have been using two separate external WiFi Cards and am able to connect to both drones. I changed the MAV_SYS_ID so I was able to enter multi-vehicle mode. But when I tried to fly simultaneously I could only start a mission one at a time by toggling between the two vehicles and as soon as I changed vehicles the first one aborted. I noticed once they were back on the ground that I seem to only be able to talk to one at a time despite being to see both of them with one of them appearing to be grayed out. Did I miss something? I am pretty new to using QGC and any advice would be greatly appreciated.
First step is to switch to using a Daily build which is way newer than Stable. New Stable will be out very soon.
Ok, I downloaded the Daily build I haven’t had a chance to test fly with it yet. Should I first and get back to you or do you have any other recommendations. Also do you know if the Mantis Camera is going to be added to the preset camera settings?
Not unless some provides me with details and asks me to add it.
Ok. The Mantis Camera has a 35mm Equivalent focal length of 22mm, the detector is 4160px by 3120px. I have been manually entering the custom camera spec as a 22mm lens with a detector size of 36mm X 24mm to get the correct FOV
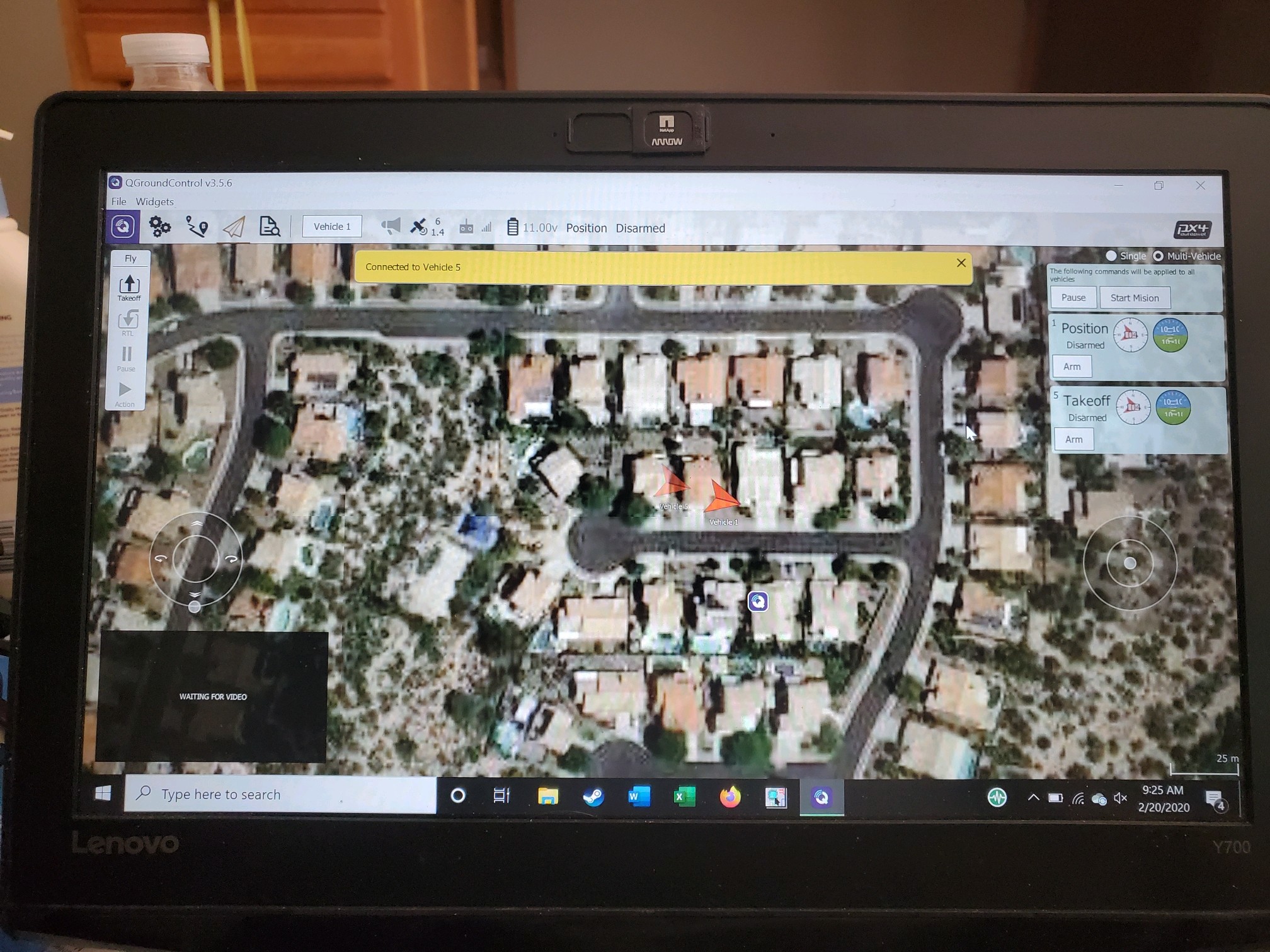
Ok, so I have downloaded the most recent version of QGC and have been working on trying to figure out why I am still having connection issues. I changed the MAV_SYS_ID. I noticed that when I try and connect both drones that when I connect the drone with the lower MAV_SYS_ID, e.g. 1, first I am unable to connect to the second drone even though I am connected over WiFi to it, but when I connect the Drone with the higher MAV_SYS_ID, e.g. 2, first it will connect but as soon as I connect the drone with MAV_SYS_ID of 1 the connection to the drone with MAV_SYS_ID 2 drops. I haven’t changed any of the other parameters as far as the MAVlink goes. Any suggestions?