Hello everybody,
yesterday I ran into some problems connecting my pixhawk cube with an Intel NUC as companion computer. (For reference about the looks of a NUC here is a German vendor site )
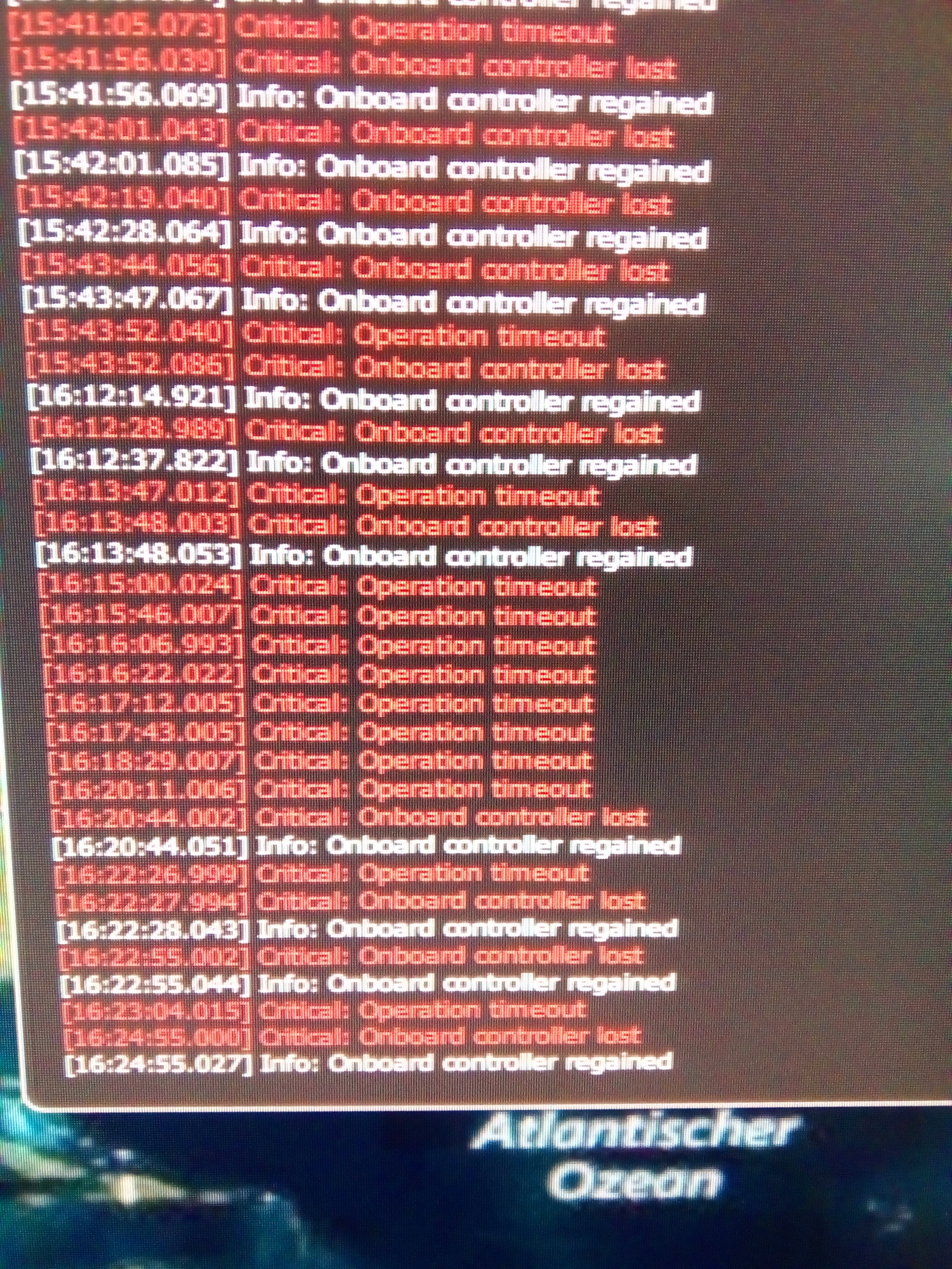
The main problem I think is about the USB-connection with the flight-controller. I’m using a USB-TTL adapter and I can establish a connection (in my case I use a ROS-System with Ubuntu). Below is a picture of my problem - the connection is lost and regained multiple times while doing nothing. Sometimes for more the 10 seconds , sometimes the connection was not able to reconnect on its own. If cancel my current mavros-connection task on the companion computer and restart it everything works fine again … at least for a while - there seems to be no pattern when the connection is lost.
So I would like to know about your experience with companion computers and how to connect them with your drones. Anyone who got a stable connection via USB-TTL running? Maybe our adapter is broken or the USB-connector is not tight fitting enough… OR are USB-TTL connection usually not a great idea?
Before I used a Rasberry PI as companion computer on another frame and that worked fine (connection via GPIO pins) but I would like to use the NUC in terms of more computational power (to handle complex sensor data, which will be added in the future).
Kind regards!
What baudrate are you using? And what data at what rate are you sending to the Pixhawk?
@hsu-ret Are you sending CompanionProcessStatus messages to the flight controller? This is a heartbeat message which enables the flight controller to monitor the status of the companion computer
Hi Julian
I’m using a baudrate of 921600 and sending a ros-pose-msg (x,y,z and quaternion with timestamps) currently at 200 Hz.
The same config worked for our pi fine just checked the params.
Hi Jaeyoung
I guess I do so… The connection is established via a mavros.launch script.
Upon executing the script I can track the console output which states:
CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
But when I loose connection I guess the heartbeat messages stops too. At least the drone outputs it received a new heartbeat , which it normally should not do.
@hsu-ret mavros does not send the heartbeat for you. You need to send it from your node.
Ok I have now connected the NUC with the other Pixhawk-Raspberry-Frame. There it seems to be a stable connection… so maybe I have a problem with my USB-connector on my pixhawk or I failed some parameter settings (which I had double checked before).
I will start some kind of endurance test and let the connection run for about an hour and will give an update whether it worked or still lost connection.
@Jaeyoung-Lim Ah ok so then I will have a look into it - I guess I missed it in the documentation.
Can you give me some links for it ? With the other drone everything worked fine and I did the whole position estimation with just a mavros connection which worked - I mean I even flew around and thought yeah thats fine. But now I wonder if it was just luck ?!?
@hsu-ret Does the two drones have the same px4 version?
Ok problem solved I guess.
The case were different firmware versions and/or different parameters.
The combination of NUC and the old pixhawk (which before was connected to the pi) ran for 2 hours straight with nor errors. I saved the parameter to a file and flashed the same firmware to the newer pixhawk with the problems (main difference was stable/master) then I loaded the other param-file to have now two similar configured pixhawks. Up to now the connection there is running fine no problems for more than the last 30 mins.
I just feared my Telem2 port might be broken but right now it seems it was just some parameter nonsense. Also I realized our ‘newer pixhawk’ might be quite old because it is affected by the silicon errata. But its running PX4_FMU_V3 so I guess its fine.
Thanks for your concern and your help @Jaeyoung-Lim and @JulianOes
Cool, thanks for the feedback.