I’m testing offboard control on my actual drone with MPC_YAWRAUTO_MAX set to 45.0 deg/s. However, during flight, the drone executes a 90-degree yaw turn, and the logs show a peak yaw rate of 100 deg/s —far exceeding the configured limit. Below is the screenshot and the
Fligt-Log
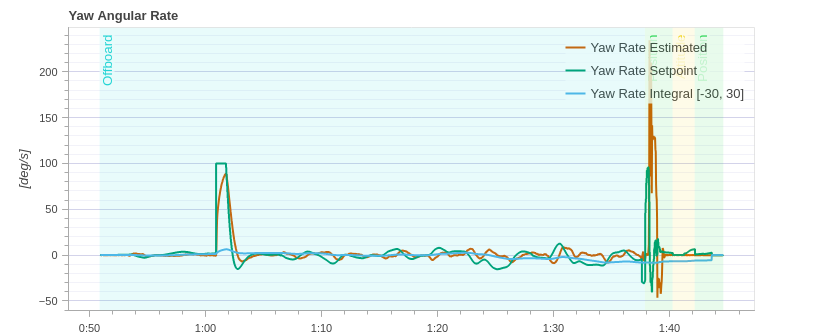
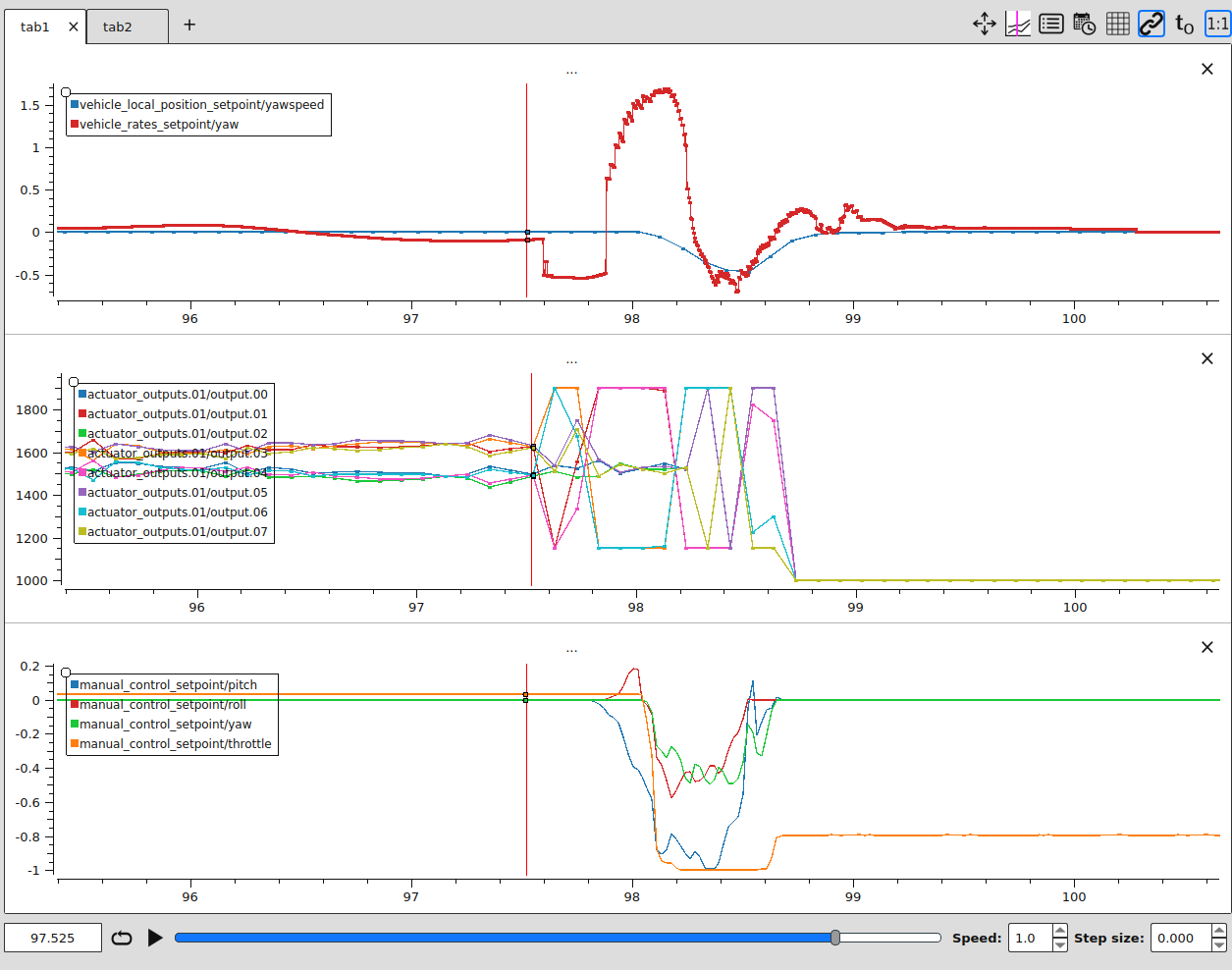
Drone take a yaw of 90 deg and move in Y-position at end it crashes