Today, my drone experienced a crash while operating in position mode. According to my initial review of the logs, there appears to be an issue with Sudden rise of z local position , which might have triggered unexpected oscillations and ultimately led to the crash. I’ve attached the log file along with a PX4 log analysis link for a detailed review. Could someone please analyze the data and help pinpoint the exact cause of this malfunction? Any insights or suggestions for further troubleshooting would be greatly appreciated.
crash time is ~15.07
Analysis by Px4LogAssistant - https://u-agent.vercel.app/share/7e078064-ab5f-4068-8be5-7241d74db149
Root Cause Analysis and Findings
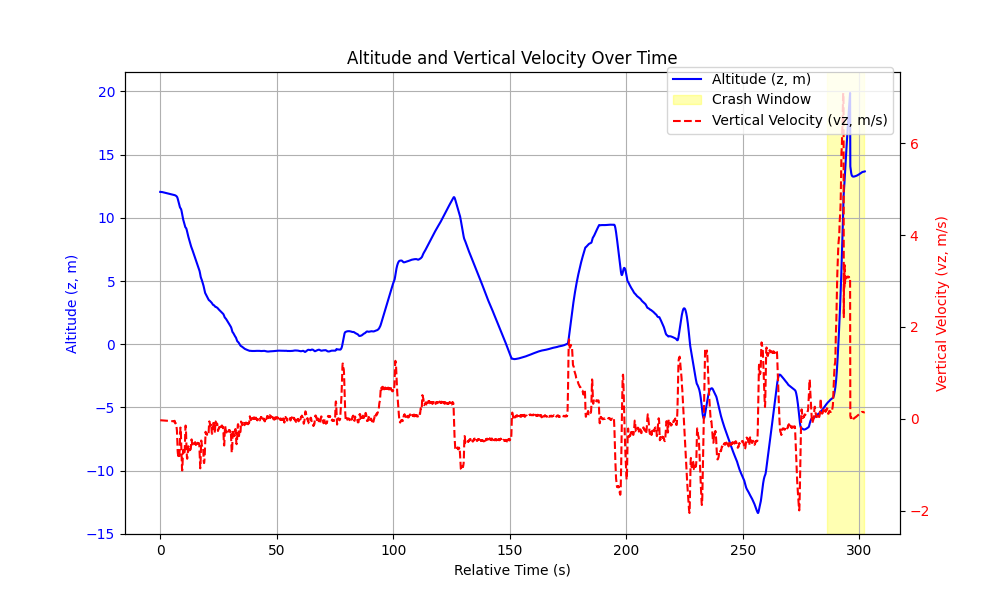
After a thorough investigation of the log data, I’ve pieced together the likely sequence of events leading to the crash around relative time 296 seconds (near the end of the flight):
- Sudden Z Rise Confirmed: At approximately 296.07 seconds (timestamp 913964300 µs), the drone experienced a sudden altitude rise of over 24 meters (z changed from -4.68 m to 19.87 m in the crash window), as seen in vehicle_local_position. This matches the user’s report and is visualized in the plot.
- Flight Mode: The drone was in POSCTL (Position Control) mode during most of the crash window, where it relies heavily on accurate position data for stability. A brief switch to ALTCTL (Altitude Control) was also observed, possibly as a response to the anomaly.
- Estimator Behavior: The estimator fused both barometer and GPS for height estimation, with no explicit rejection of vertical position or velocity data. This means the sudden z rise was based on accepted sensor inputs.
- Sensor Innovations: The barometer showed a significant positive innovation (up to 5.64 m), suggesting it may have reported an erroneously high altitude, potentially misleading the estimator into believing the drone was higher than it was. GPS innovations were less extreme (mean -1.24 m), indicating a smaller discrepancy. The range sensor, while showing a large innovation (-16.42 m), was not fused for height and thus did not directly contribute.
- Controller Response: The controller did not set a specific z setpoint (NaN), but commanded vertical velocities (up to -1.5 m/s for climb and 0.7 m/s for descent) and strong downward thrust (mean -0.854), likely attempting to stabilize or correct after the rise. The rapid descent velocity of 7.09 m/s post-rise suggests a loss of control or a crash.
- Root Cause: The most likely cause of the sudden z rise is an erroneous barometer reading, as it was fused for height estimation and showed a significant positive innovation (5.64 m) during the crash window. This could have caused the estimator to incorrectly update the z position, leading to an unintended climb in POSCTL mode. The subsequent rapid descent (vz = 7.09 m/s) and potential oscillations (seen earlier at 190.67 s) indicate the controller struggled to recover, ultimately resulting in the crash.
Hi,
The most probable cause of your fall is because of GPS failure OR Battery calibration error and activating the KILL SWITCH in mid air !