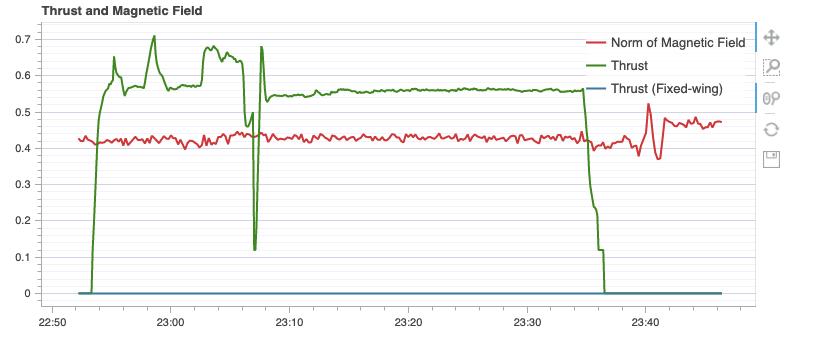
We have had an issue a few times now, where our VTOL UAV reports “Failsafe enabled: no global position.” and enters descent mode. However, the magnetometer readings looks fine from what I can tell, and there is no significant correlation between thrust and magnetometer norm.
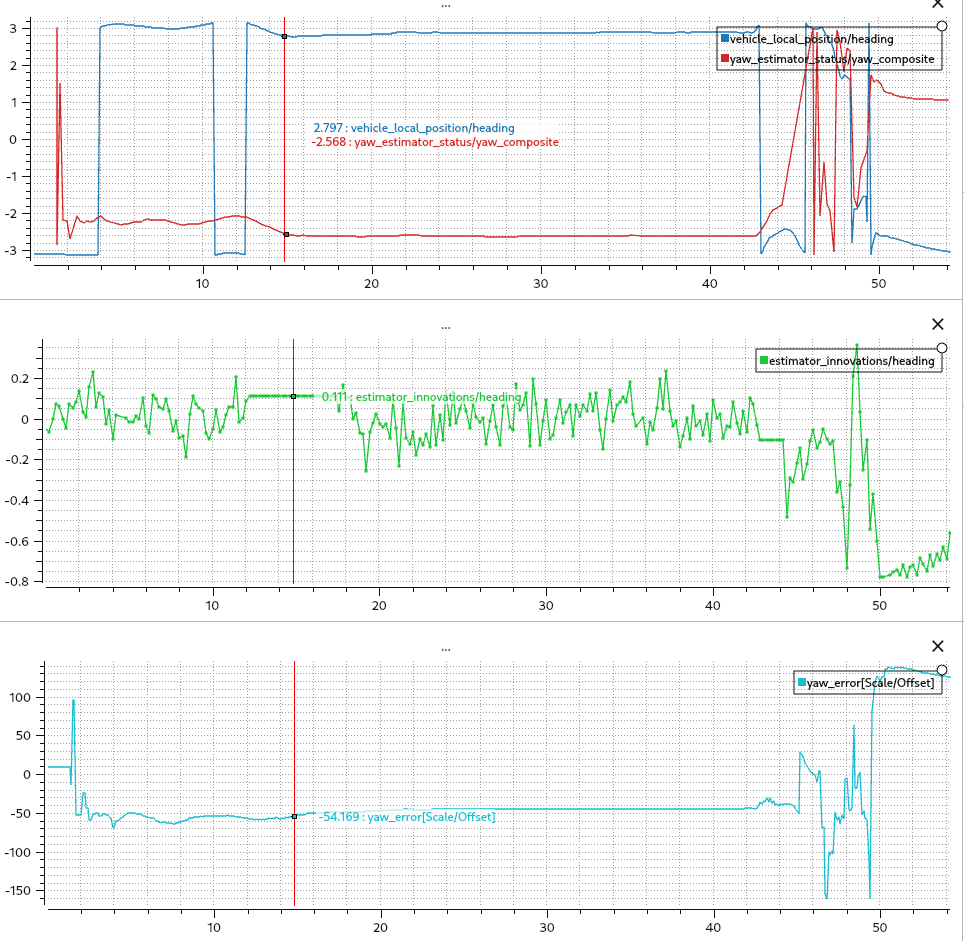
There’s a ~50 degrees difference between the heading from mag and the one estimated from the inertial+GNSS yaw emergency estimator. If you didn’t have this issue before, it shouldn’t be a wrong rotation setting but probably some soft or hard iron effects (e.g.: magnetization of some components on the drone, added payload, hardware modifications). A fresh mag calibration should fix it.
v1.12 is definitely better at catching those issues (better heading estimation and failsafe) so I would strongly suggest to use it, but the root cause of the problem doesn’t look to be software related.
This happened after 10 successful flights without any prior issues. I am wondering why this suddenly became an issue. We are running with EKF2_DECL_TYPE = 7, i.e. “use geo_lookup declination”, “save EKF2_MAG_DECL on disarm” and “use declination as an observation” are all activated (according to this). Could this potentially have anything to do with this issue suddenly appearing?
We definitely did not do any hardware changes at all between flights. Any idea what could cause this problem to suddenly appear, and what we can do to prevent it in the future?
Check your compass/GPS connector of the Flight controller, some time in high vibration the connection get lost for a very short time. , secondly check heading of the UAV on QgroundControle and cross check it with the physical orientation of the UAV. if it is different then compass caliration is important otherwise UAV get crash at takeoff.