Hi,
I’m integrating a different underwater simulator (interface:ROS) with PX4 (UDP:MAVLink), using libmavconn. I’m able to get basic messages passed across the setup, and I’m passed the point of getting the simulator module to fully start, but just like with the gazebo setup I would like to use GCS to communicate control modes and send manual_sp/joystick.
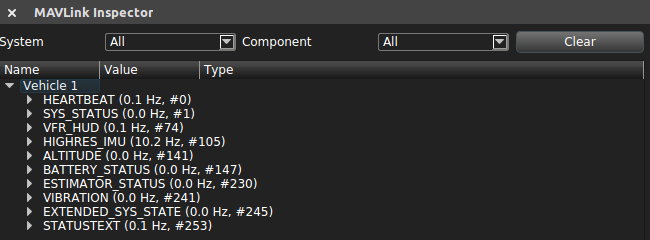
I’m just sending imu data from the simulator as a start and that’s the only one mavlink msg I see shown in the mavlink inspector in gcs (attached pic). Isn’t PX4-SITL suppose to be sending messages independently? What am I missing?
In brief, what are the bare minimum messages that I need to send from my simulator to PX4 to get GCS fully working? And should I expect to interface with gcs from the simulator directly? (the SITL diagram suggests that not to be setup)?
{kind=link}
Thanks,
Ali