Build specs:
Opterra 2m (stock) with 3S 8000mah
Pixhawk 2.4.8 v5 Bootloader
Firmware: v1.8.0dev
Airframe: FX-79 Buffalo Flying Wing
Flight Log Review
Brief YouTube Video from BitEye camera mounted on the nose.
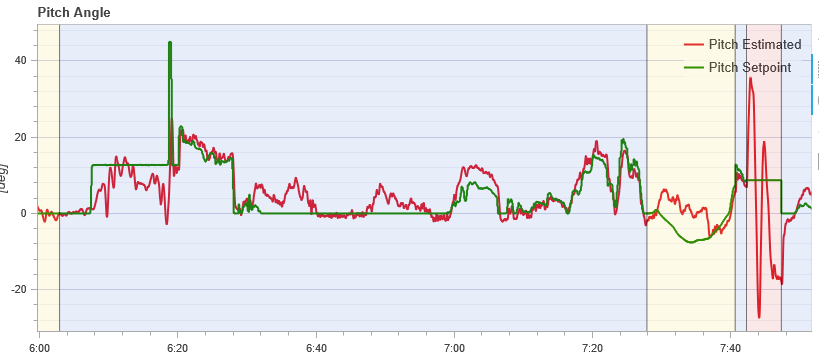
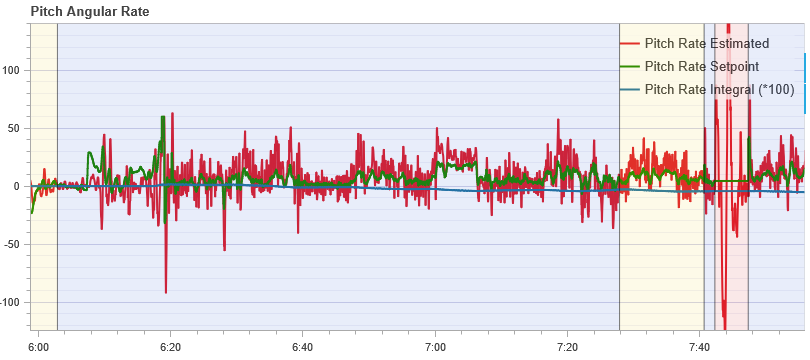
I would like to have a better understanding of what I’m looking at with the log review so the aircraft can fly smoothly. The pitch axis seem to be oscillation and I’m not sure what the log chart exactly mean and what params need to be adjusted.
I believe that this is the section of the log that corresponds to the video (hopefully) because the first launch attempt failed.
Questions:
- What’s the difference between Estimated vs. Setpoint?
- What is the goal; sync Estimated to Setpoint or Setpoint to Estimated?
- Difference between Pitch Angle and Pitch Angular Rate graph?
- How does Pitch Rate Integral relate to Estimated and Setpoint? Why is it relatively flat?
Tuning Values questions:
- Which param needs to be adjusted.
- I’m presuming something needs to be reduced; if so by how much?

Also, during bench testing, I noticed that in both Altitude and Position Flight Modes, the Elevator doesn’t respond to Tx commands like in Stabilize mode. It’s contradictory to the docs. Is this normal? If so, do you use the Throttle to change altitude? If not, how?
Due to the fear of possibly the prop hitting my hand if the throttle is full, I hand launch this plane with the throttle off. I do have a Tx switch on the Taranis X9D+ that adds 25% Up Elevator/ Exaggerated Reflex setting, to help keep it afloat before I’m able to apply throttle for a climb out. There’s about a 2-second lag between release from my hand and applying throttle (human and age latency… LOL). I would like to use the Skydroid M12L but unfortunately, it has no switch programming ability like OpenTX.
In reading some of the posts and issues filed for the Takeoff mode, there seem to be issues with Thottle Off launches and doesn’t seem to have a 100% success rate to detect the launch, even it seems when using a launcher. So, is there a way to have, say an extra.txt in the SD card that will give this 25% Up Elevator command triggered by a switch on the Tx? If so, could someone please provide the file to add in the SD card’s \etc\ folder?
@dagar @ryanjAA @JulianOes care to comment/ chime in?
Thank you for any and all the help.