I’m attempting to use an x500 with Gazebo simulator. However, I get this error when running the simulation:
INFO:gazebo.stream_logger.x500_0.px4:stdout: WARN [health_and_arming_checks] Preflight Fail: Compass Sensor 0 missing
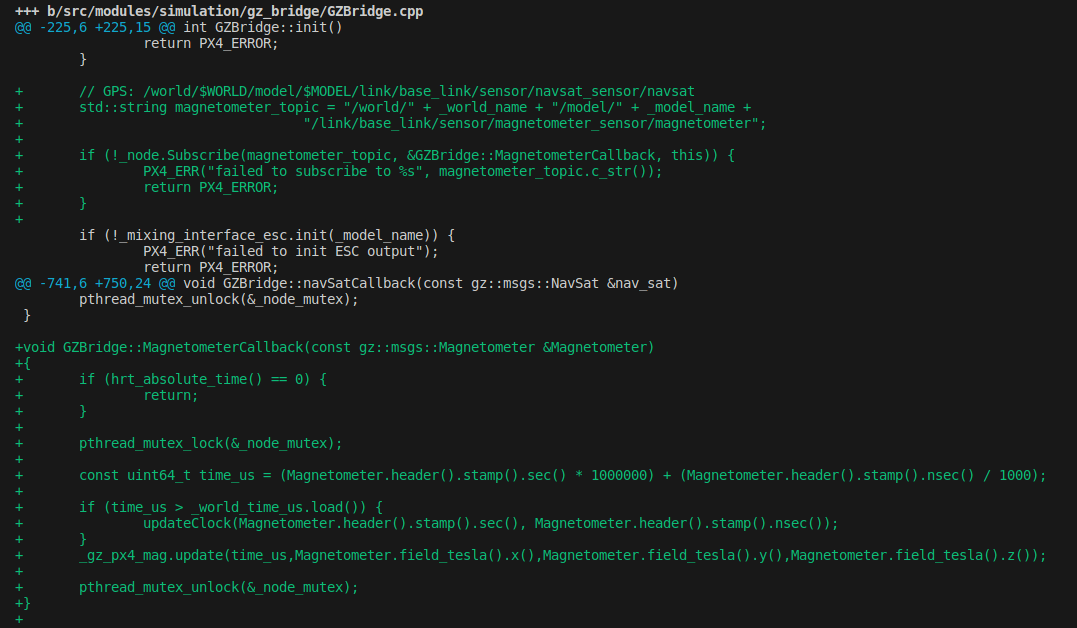
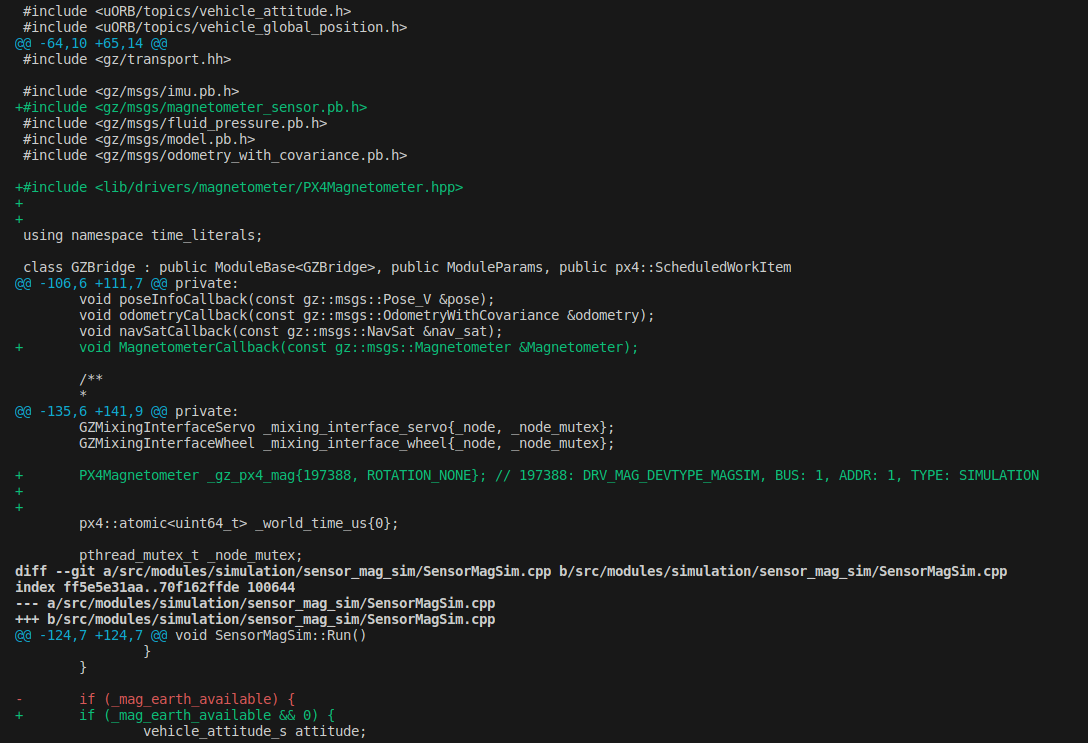
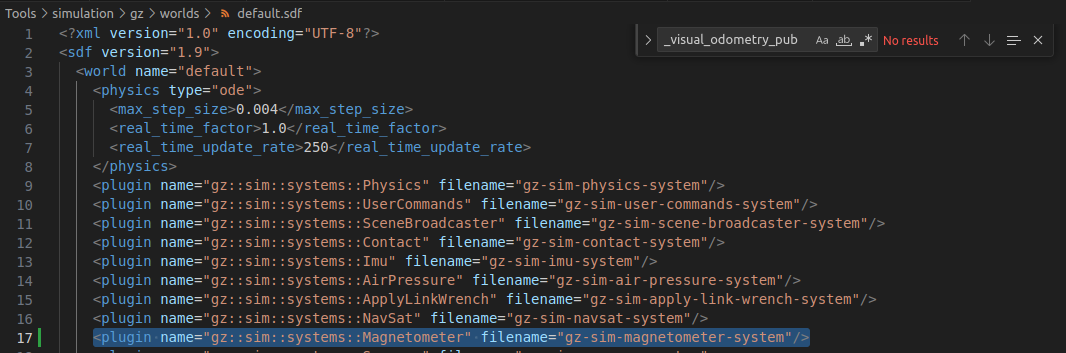
I have added a magnetometer to the x500 model.sdf following SDF 1.9 (SDFormat Specification):
<sensor name="magnetometer_sensor" type="magnetometer">
<magnetometer>
<x>
<noise type="gaussian">
<mean>0</mean>
<stddev>0.00018665</stddev>
<dynamic_bias_stddev>3.8785e-05</dynamic_bias_stddev>
<dynamic_bias_correlation_time>1000</dynamic_bias_correlation_time>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0</mean>
<stddev>0.00018665</stddev>
<dynamic_bias_stddev>3.8785e-05</dynamic_bias_stddev>
<dynamic_bias_correlation_time>1000</dynamic_bias_correlation_time>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0</mean>
<stddev>0.00018665</stddev>
<dynamic_bias_stddev>3.8785e-05</dynamic_bias_stddev>
<dynamic_bias_correlation_time>1000</dynamic_bias_correlation_time>
</noise>
</z>
</magnetometer>
</sensor>
I have followed the same process as the IMU which seems to be working fine.
Any help would be much appreciated.