I would like to simulate point cloud readings in the environment on a quadcopter and tried to use the gz_x500_depth vehicle for software in the loop.
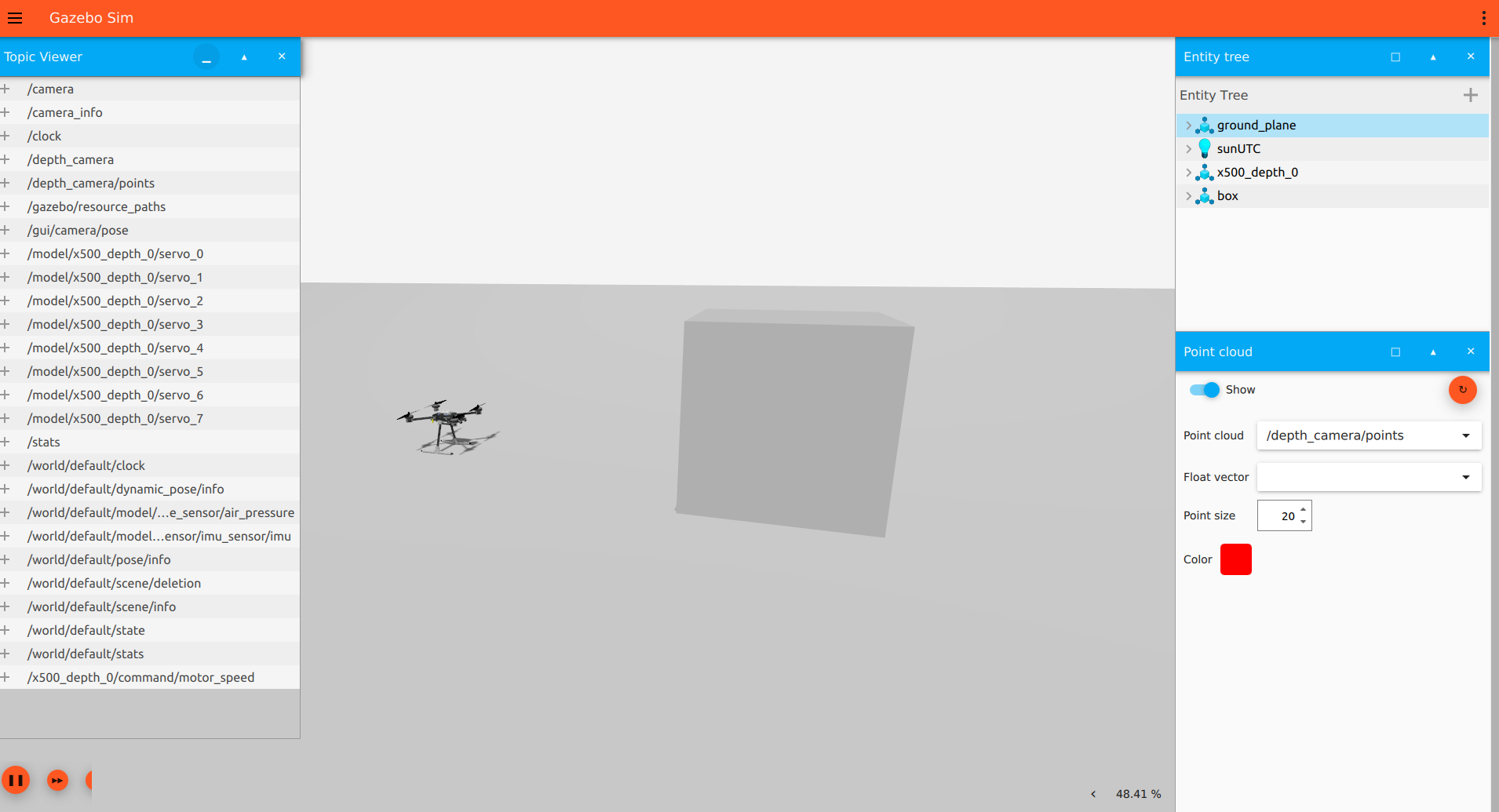
I’m able to see the topics /depth_camera and /depth_camera/points, but I’m unable to display the pointcloud in gazebo. Am I missing some steps?
Here are my screenshots for reference (I also added a box in the default world):
The command “gz topic -e -t /depth_camera/points” shows a bunch of numbers:
I’m using Ubuntu 22.04 Jammy Jellyfish, Gazebo Garden v7.5.0 and the latest PX4-Autopilot code downloaded today. I’m not using ROS in this setup, just Gazebo.