Hallo zusammen,
ich bin Neuling beim Thema Dronen und würde gern in das Thema einsteigen, indem ich eine selber baue. So erhoffe ich mir technisches Wissen anreichern zu können.
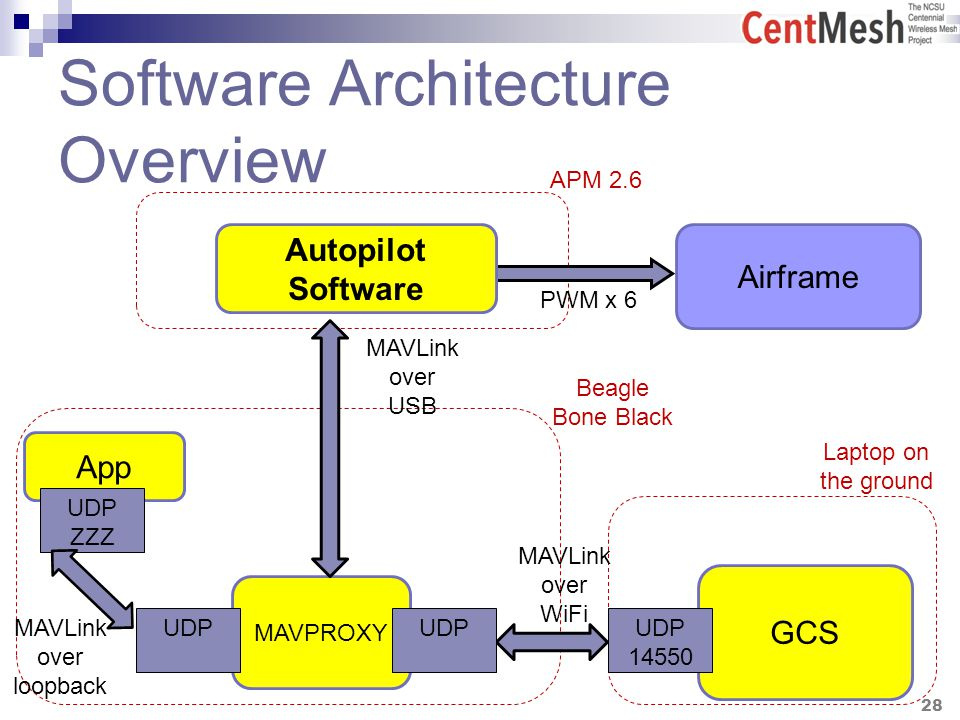
Was mit persönlich fehlt, ist ein Überblick aller nötigen Komponenten incl. der dazwischen verwendeten Protokolle.
- Speziell die Stelle, an der man MAVproxy einsetzen kann, um ein Kamera-Bild zu streamen, ist mir unklar. Wenn ich das richtig verstehe, kommuniziert der MAVproxy über eine serielle Verbindung mit dem PX4-kompatiblen Controller. Was erwartet mich hinter dem Proxy? Rede ich über den Netzwerk-Socket wieder im MAVLINK-Protokoll?
- Warum weist die Großzahl aller Anleitungen darauf hin WLAN zu nutzen? Die Verwendung eines GoPro’s und einer Gimbal klingt schonmal nett, aber eine Vorschau des Bilds mittels verzögerter Übertragung wäre mir recht, bevor man hin und her fliegen muss.
- Mit welchen Reichweiten kann ich realistisch (Minimum) mit WLAN rechnen? Finde dazu leider unterschiedliche Meinungen/Behauptungen.
Vielen Dank!