Hi all,
I have a flamewheel f450 quadcopter frame with pixhawk v2 FMU and Tiger Motor MT-4006-13 740kv with 10" APC MC props.
I am running firmware: 1.12.1
This is a build that I’m trying to tune. The quadcopter bounces when close to the ground. I believe it’s suffering from ground effect issues with the barometer.
According to the guide, I can use the dip below the steady-state ground value (add 10%) and put that into the EKF2_GND_EFF_DZ parameter. However, I am having trouble getting a value from my logs. Take a look at my logs: https://logs.px4.io/plot_app?log=e1f63ea2-7502-45b6-b63d-222c6b775eb5
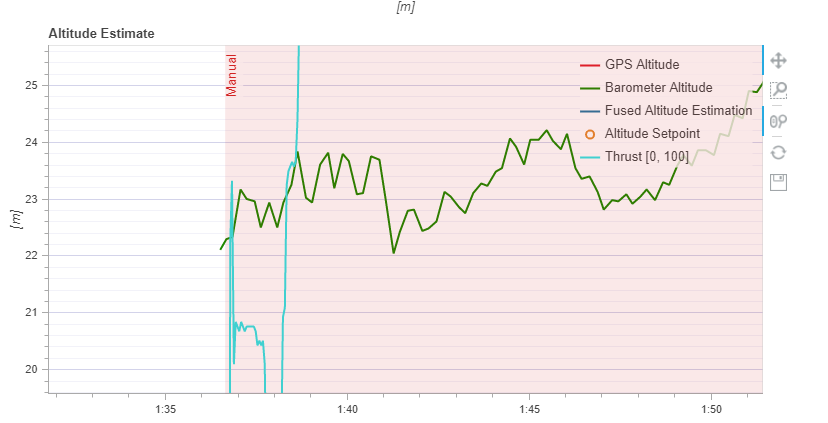
The dip is not so pronounced as in the guide.
There is a slight dip below but note the oscillations:
How do I use this information to tune the dead zone? How does the dead zone work? – Does it allow the flight controller to ignore the barometer data until a certain altitude is reached?
Maybe I’m looking at the wrong parameter. If you can spot something else in the logs, let me know.
Hi @Manny_Bains , I have the same issue, can you elaborate on the result you had after adjusting EKF2_GND_EFF_DZ since you said you only could make it by easing on throttle so the adjustment of EKF GND DZ didn’t have any effect or I’m misunderstanding?
Can you share a log for the flight after adjusting plz.
Hi Falcon,
Basically, being close to the ground can fool the barometer. If you’re trying to come down too fast and include the ground effect in that input then the UAV can overcompensate.
For me what this meant was that I would get a bounce/oscillations when trying to land quickly.
The solution for me is to increase the deadzone and land steadily.
So which plot in log analysis I should look into it?
What I see in my log file is altitude estimate graph which shows Baro & GPS altitudes and I see a difference there but the line in graph look’s horizontally straight not sure what to look for!