Hello everyone,
As part of my project, I developed a flight controller algorithm for a quadrotor, and I was eager to put it to the test in a simulated environment using Simulink. Unfortunately, I’ve hit a roadblock right from the start and the quadrotor won’t even get armed. I’m at a loss as to what might be causing this problem. I am leaving the logs here and any help would be appreciated.
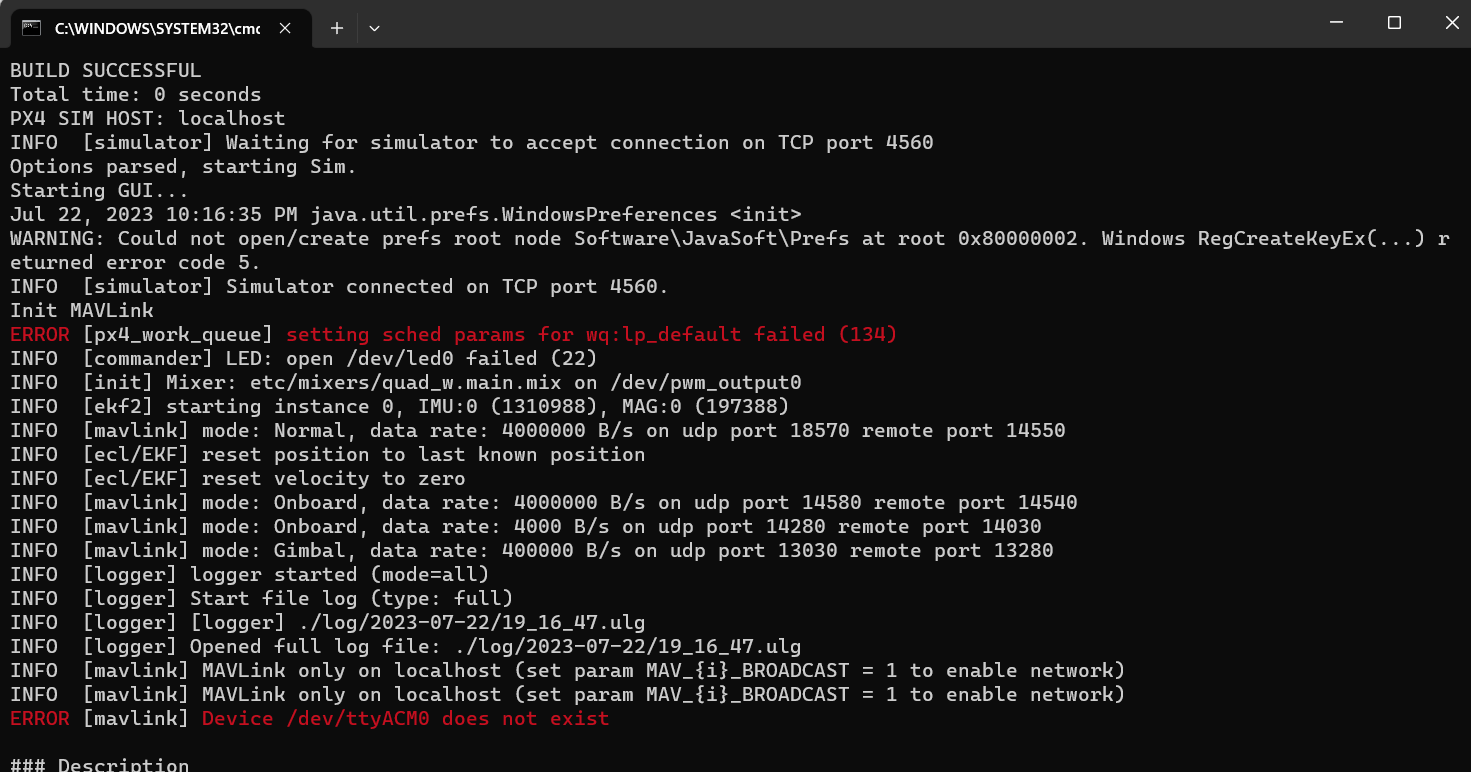
This is from the terminal at the start of the simulation.
What I have tried so far:
- Firstly, I had a problem with EKF2, but by setting EKF2_MULT_MAG and EKF2_MULT_IMU to 0, I sorted out the problem.
- I also set the COM_RC_MODE to 1 so that RC is not required.
- I built the firmware many times.
Best Regards,
Joe