The PX4 flight control system cannot effectively control the desired altitude setting. When the remote control throttle is in the neutral position, the expected altitude value set by PX4 fluctuates greatly. Is this a bug in PX4?
Airframe: Generic Quadcopter
Quadrotor x (4001)
Hardware: CUAV_X7PRO
Software Version: v1.15.4(99c40407)
OS Version: NuttX, v11.0.0
Estimator: EKF2
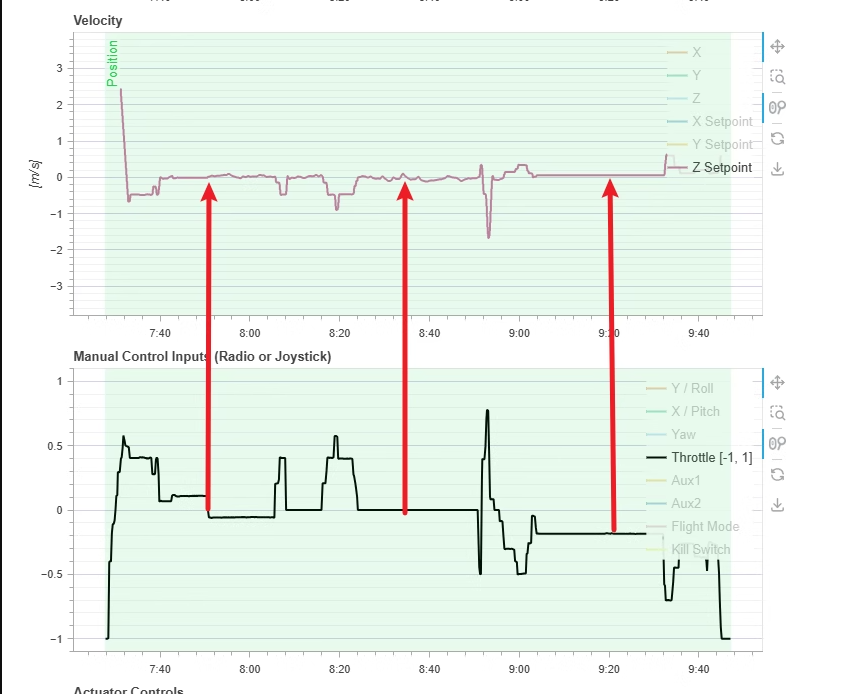
You can check the Flight Review analysis here at the following website: