Hi, every one!
Did any one test the altitude mode of px4?
I tested it this afternoon,and tuned it’s pid parameters.
After that it’s altitude almost keep permant.
However it’s suddenly go down to the lowest point when you stop to fly the quadrotor.
After that it will go up to it’s origin height.
any one occur this?
Are you saying you landed and then the altitude setpoint went back to the home altitude?
Sorry,it’s no.
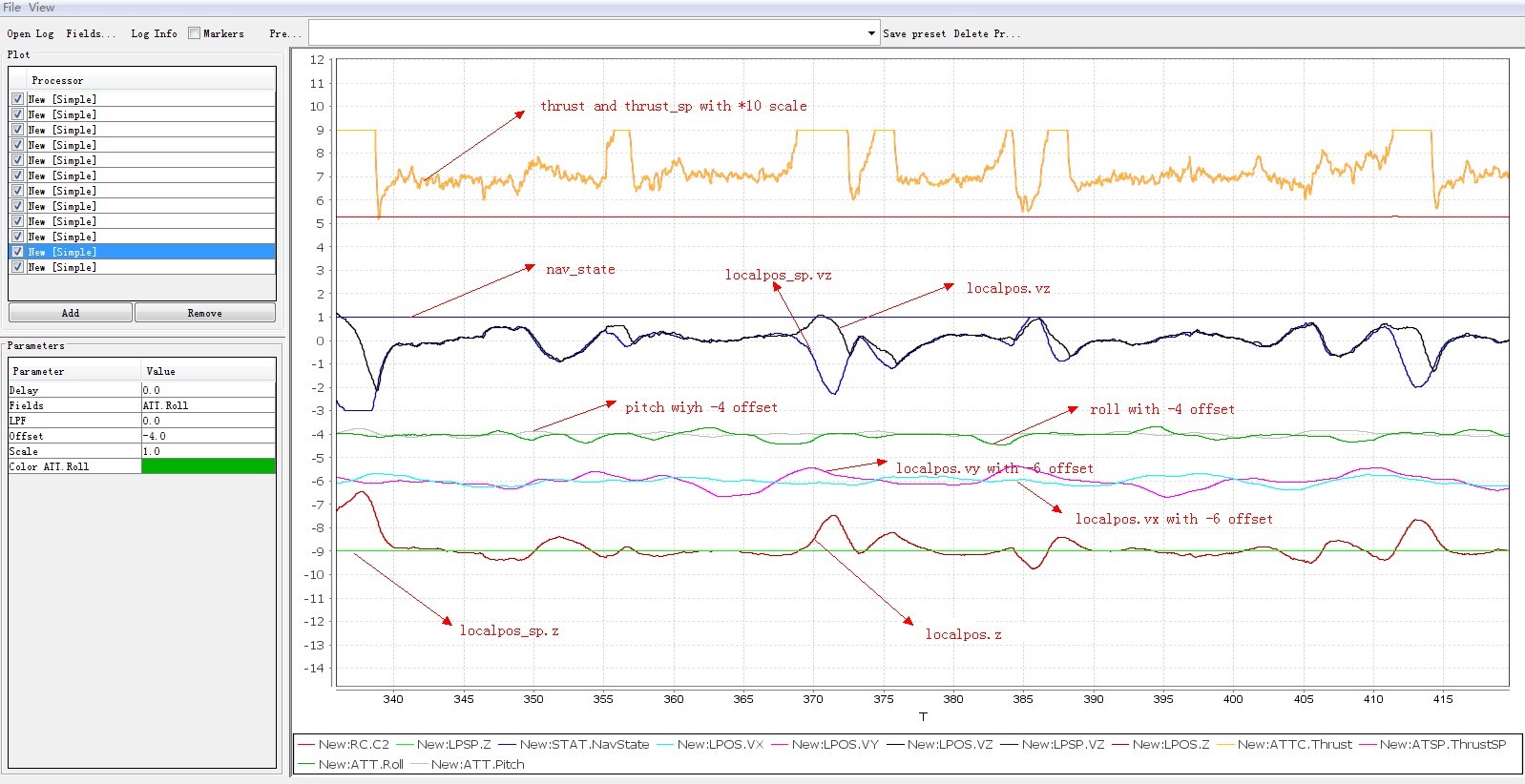
In the process I fly it to the fornt,back,left and right,the change of height is small.
But when I stop to control it,it suddenly drop very large.
And after it arrive to the lowest point,it start to ascent,and it almost ascent to it’s original height.
Sharing a log would help.
It sounds similar to this slew rate issue (https://github.com/PX4/Firmware/issues/6681), but I’m not entirely following what you’re saying.
Hi,dagar.
Please refer the address:http://logs.uaventure.com/view/ZngFkcSKoW76wxYCuee5c9