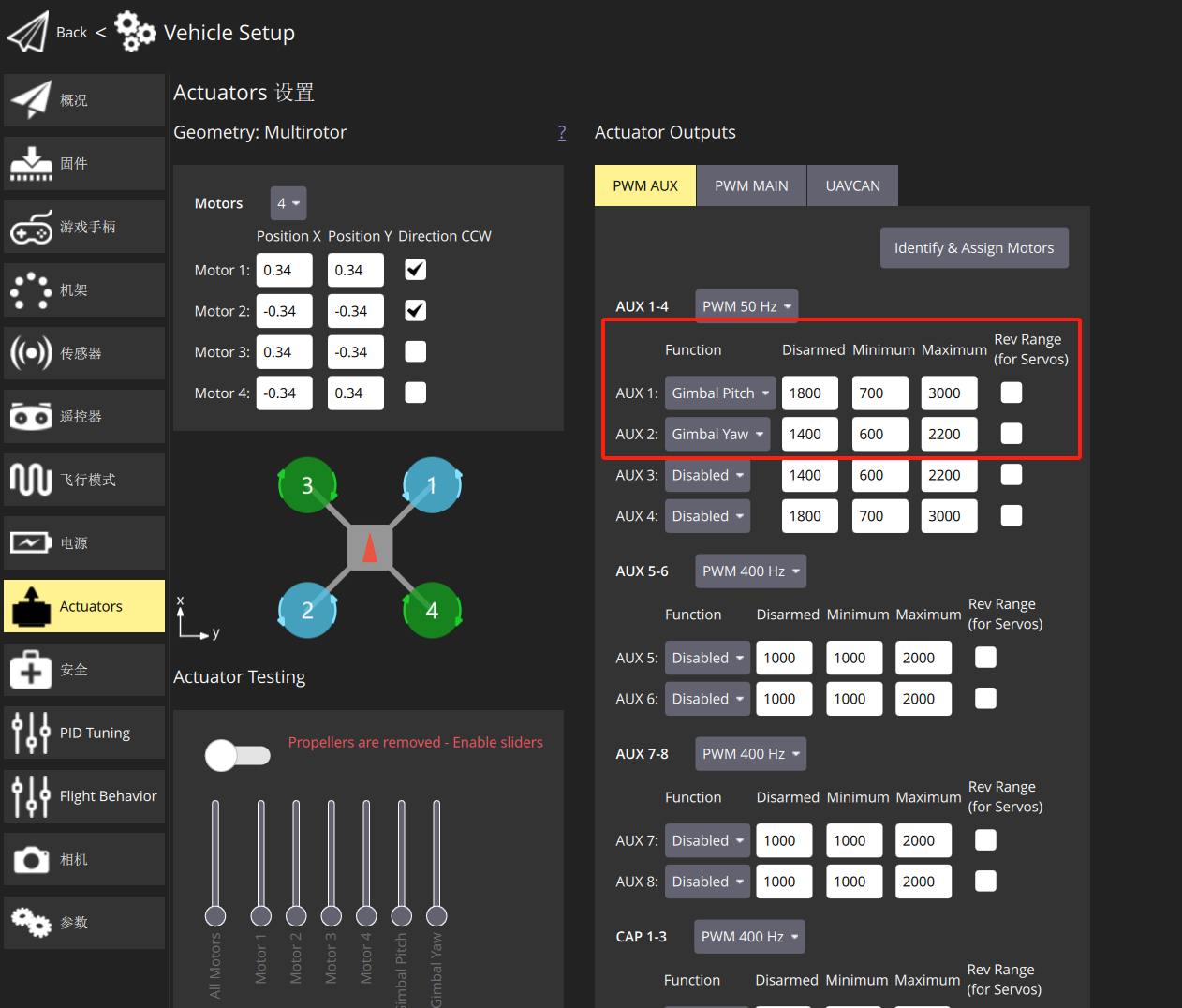
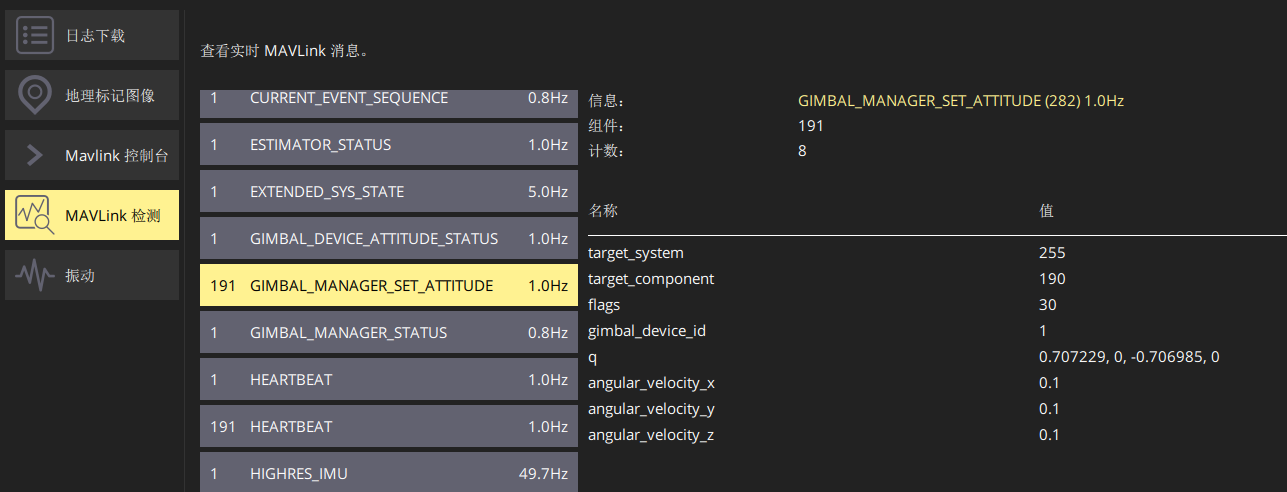
I want to control the gimbal using mavros, but I’m having some trouble now. I can currently control the gimbal using the QGC gimbal tool, but when I try to control it using mavros, I publish the topic “/mavros/gimbal_control/manager/set_attitude”, but the gimbal doesn’t respond. I wonder where the problem lies? Here are my configuration screenshots and the data from the mavlink detector, when I publish the topic, I can see that the detector has GIMBAL MANAGER SET ATTITUDE, but the gimbal doesn’t respond, and the angle display in the gimbal toolbar doesn’t change either.



The following is my command to publish ros topic, can you help me see where there is a problem or the setting is wrong。
ros2 topic pub /mavros/gimbal_control/manager/set_attitude mavros_msgs/msg/GimbalManagerSetAttitude "{target_system: 255, target_com
ponent: 190, flags: 30, gimbal_device_id: 1, q: {x: 0.0, y: -0.7069846987724304, z: 0.0, w: 0.7072288393974304}, angular_velocity_x: 0.1, angular_vel
ocity_y: 0.1, angular_velocity_z: 0.1}"