Hello Hello,
some long time no see!
I recently had the opportunity to test the new PX4 (main) firmware on a 6XRT drone configuration and wanted to share my experiences, observations, and some data from the flights.
Test Setup:
-
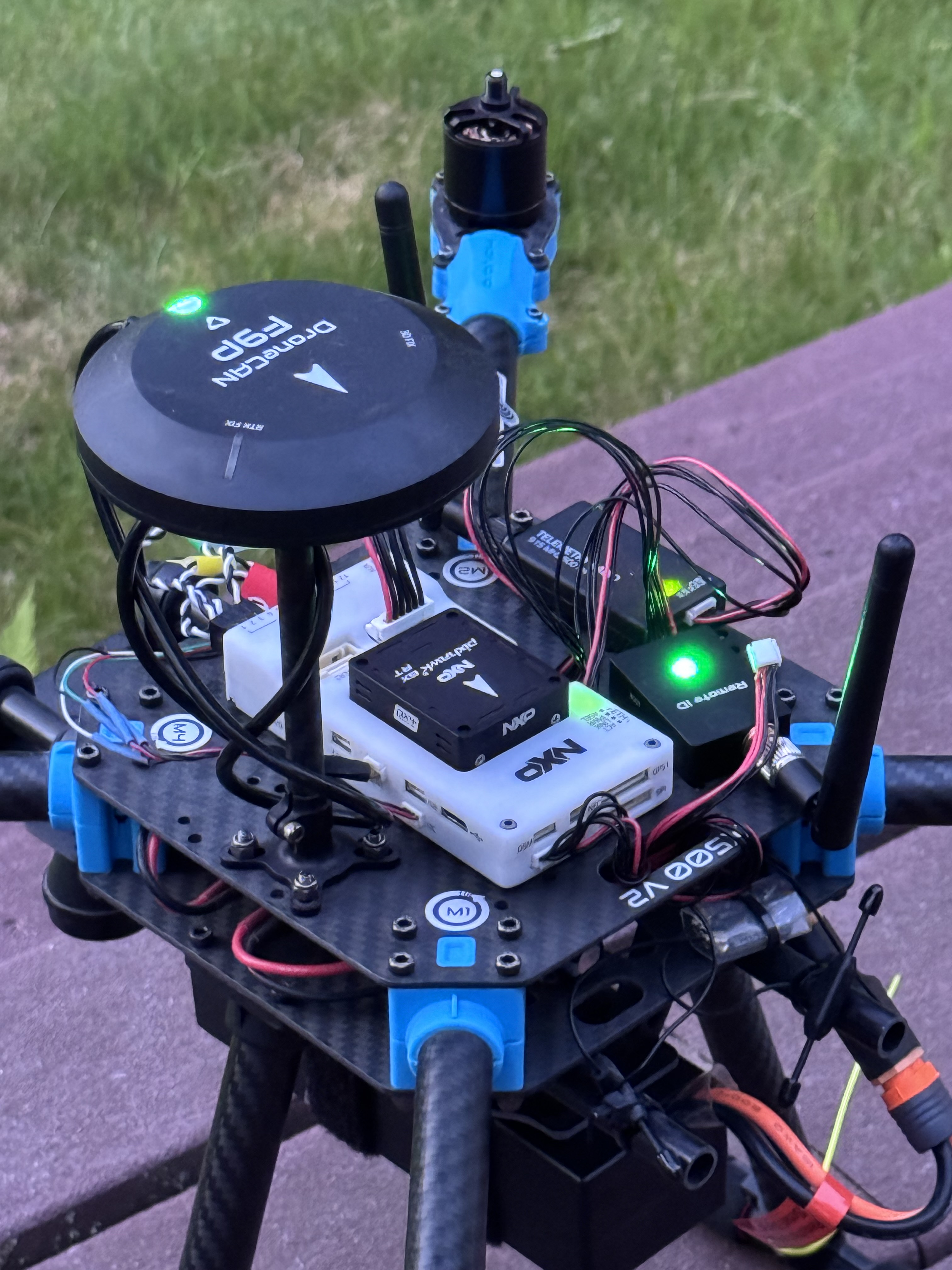
Drone Configuration:
FCU: NXP 6XRT
Telem: https://holybro.com/collections/telemetry-radios/products/xbp9x-radio
Range sensor: https://lightwarelidar.com/shop/sf11-c-100-m/
Radio: RadioMaster TX16S – Holybro Store (ELRS)
Frame: X500 V2 Kits – Holybro Store
GPS sensor: DroneCAN H-RTK F9P Rover – Holybro Store
RTK set: H-RTK F9P GNSS Series (IST8310 Compass) – Holybro Store -
Firmware: Latest main
-
Location: Logs can tell!

-
Conditions: Half cloudy weather
Observations:
The first impression was a really nice stabilized flight which was stable for real. Altitude, Position and Hold mode in addition to return and takeoff modes all we doing as they had to.
Issues & Feedback:
- The moment connecting with the battery Yaw Estimate Error was appearing.
- RTK did not switch to and I was having only 3D Lock the whole testing time. Although QGC surveying was complete!
- Latency was so high such that params took very long time than normal to be received with once in a while QGC errors mentioning Vehicle could not send params fully! (You know which error am talking about)
- Distance sensor readings are fishy
Flight Logs
This one below I guess I lost a prop while flying: