Hello,
Setup
- PX4 V1.14.3
- Board: Holybro - Pixhawk 6X
Issue
When using Mavlink (it’s running as MAV_1 instance), with all the recommended settings for the Ethernet setup, I’ve encountered that the associated Mavlink task dies/freezes when requesting the log list from QGC.
Sometimes it also happens when the drone disarms and the log file gets closed.
The SD holds about 1 GB of logs.
Pre-failure
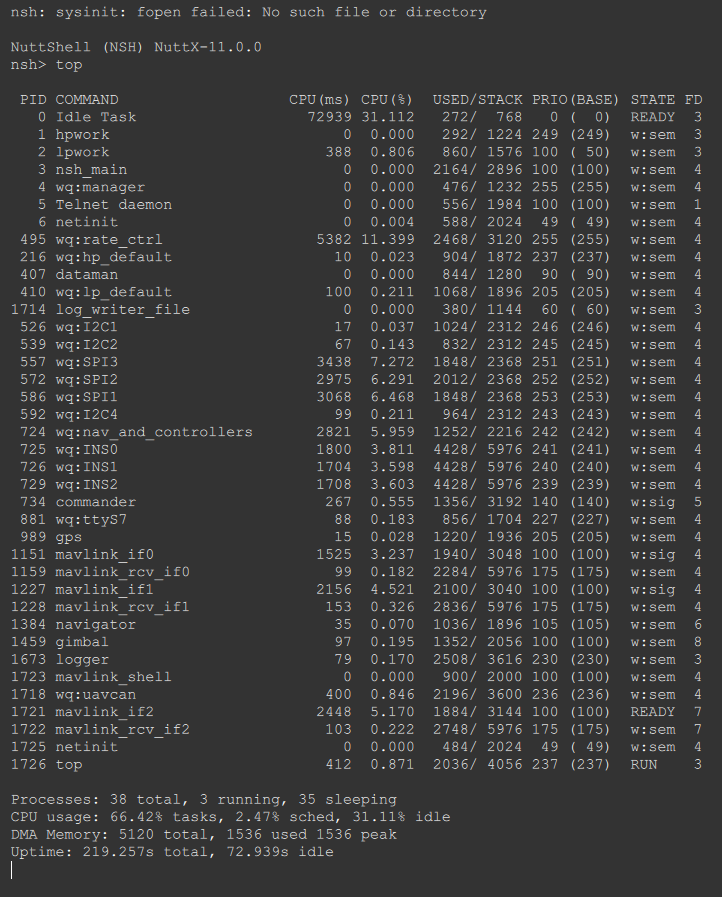
Once it fails when disarming or when requesting logs via QGC, the mavlink_if1 and mavlink_rcv_if1 instances are stuck at 0% CPU and the board needs to be rebooted.
- Any testing ideas?
- Is it a bug in the codebase?