Hi evryone
I’m new to Px4. I want to switch between aducopter mode and arduplane mode using Pixhawk only. what’s the steps to do that and should I do some coding. From what I can see that we are using Linux and I’m not familiar with that. Can I use C++ to do the code if it’s needed.
Thank you
This Discussion Board is about PX4 Flight Stack, which is a different Product from Ardupilot Products. For Information about Ardupilot consider : http://ardupilot.org/dev/
Thank you Andreas for your reply.
Do you have any idea how to use the pixhawk because that what I have and I need to switch between two modes.
Maybe you explain what xou are trying to archive? Sound to me like a VTOL vehicle for which PX4 offers some Support as well.
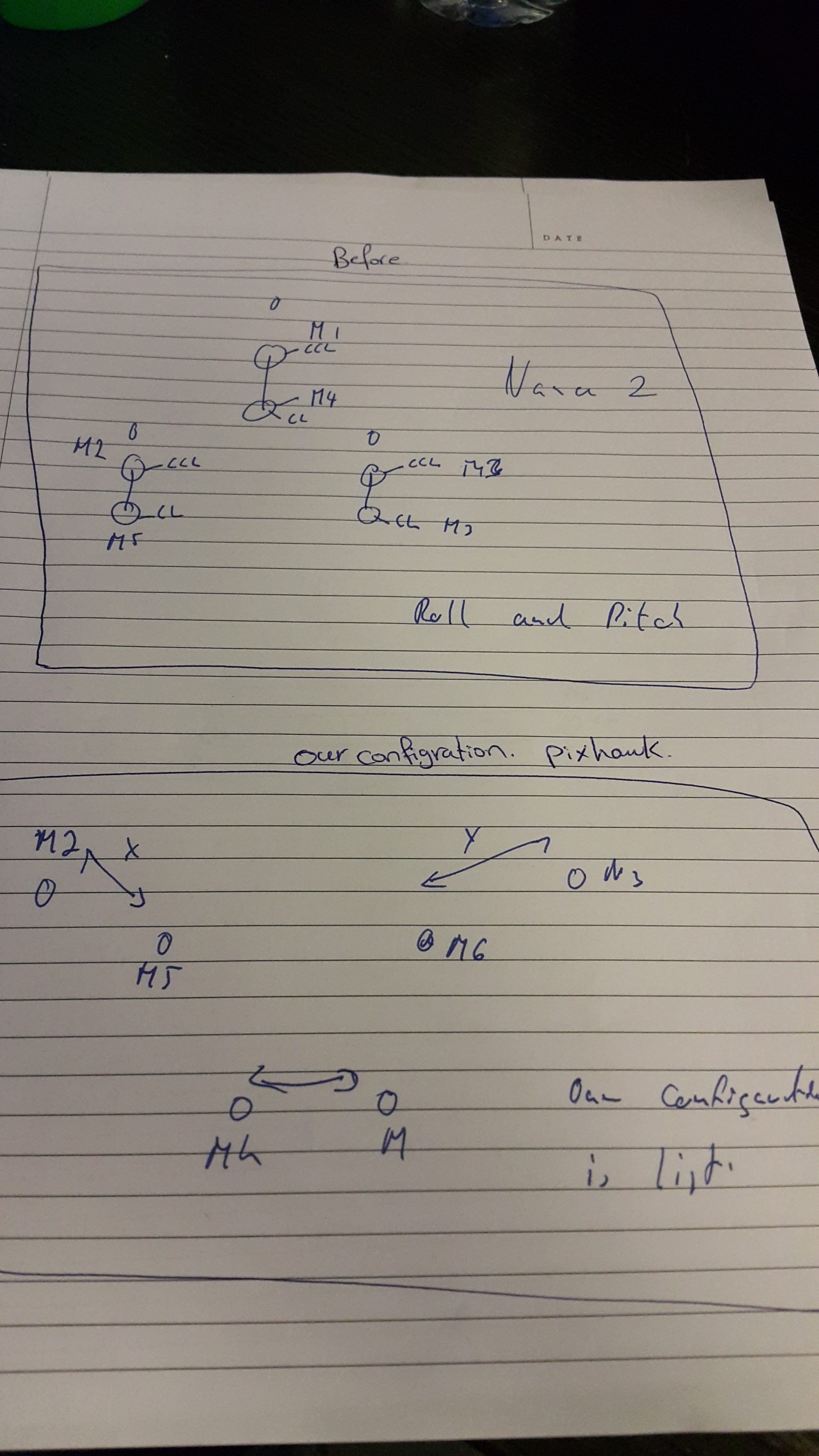
yes it’s like a VTOL vehicle. I will explain in details what I had before and what I did. I had naza 2 controller and I had the epsilon modes. the problem was that when I was trying to do the transition, I faced some issues in Roll and Pitch. Now I want to switch between thw Hcopter mode and fixed wing mode using PX4.
I don’t have a VTOL, but maybe what you are trying to archive is possible by using a VTOL Configuration in PX4 Stack. Have a look here: https://pixhawk.org/platforms/vtol/start
Thank you Andreas for your help
The information you are looking for is here http://ardupilot.org/plane/docs/quadplane-support.html
Ardupilot has full VTOL support on many vertical motor and fixed wing configurations. The majority of the contestants of the outback challenge used it… including the winner.
Thank you magicrub for your help