Dear all,
I’m currently trying to build a VTOL and I want to test the elevator and ailerons. My problem is that it seems that the aircraft doesn’t switch from multicopter to fixed wing mode. I assigned channel 7 on the RC for the transition switch parameter but nothing really happens when using the lever on the RC. Is there something I need to keep in mind? Currently, there is no airspeed sensor integrated. Could that be the issue?
Thanks for your help!
Could you share the flight log?
You can upload via Flight Review: Log Analysis using Flight Review | PX4 User Guide
1 Like
https://review.px4.io/plot_app?log=ad7b1d63-6c45-4397-8ad7-012f920ca999
In the log messages, you can see nowhere that the flight mode is changed. And this wonders me as I used the switch and in QGroundControl it is visible that the switch works.
From the log it is apparent that your vehicle isn’t a VTOL (not configured to be):
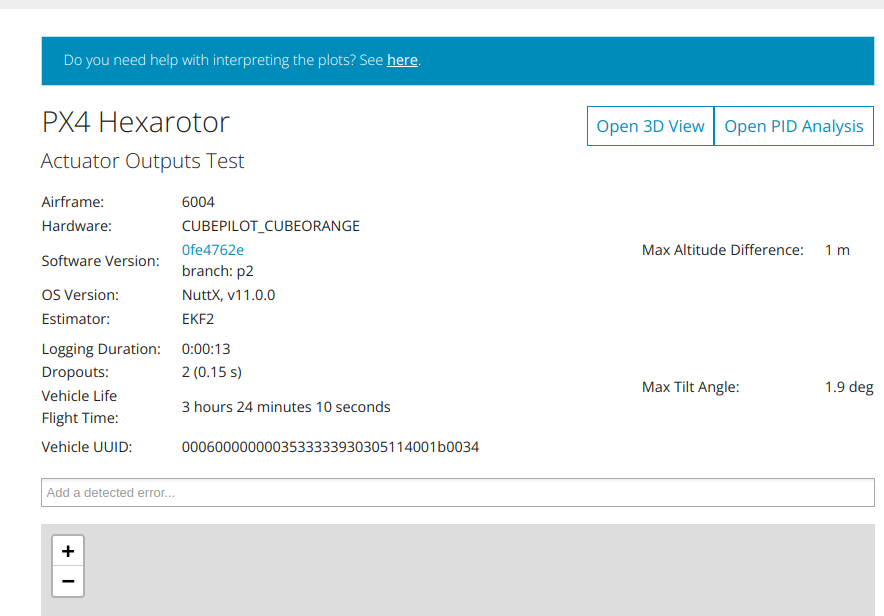
Also, it sees that your airframe is a ‘Hexarotor’ (Title of the log review):
Is it actually a VTOL? Did you configure it as a VTOL in Airframe selection? (Refer to: Frame Setup | PX4 User Guide)
Could you share the picture of the vehicle? Just to check whether it is actually a Hybrid VTOL or not as well 
Thanks for your help at first! We actually defined an old airframe which imports the standard vtol airframe (see attached) so I would guess that the is_vtol parameter should be non zero. Do you have an idea why the is_vtol parameter is zero? Is there more about it than just the airframe?