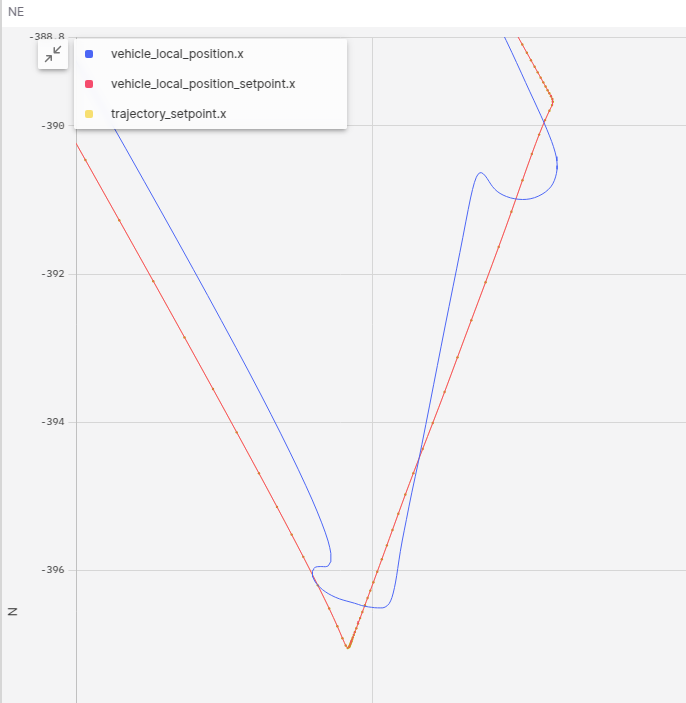
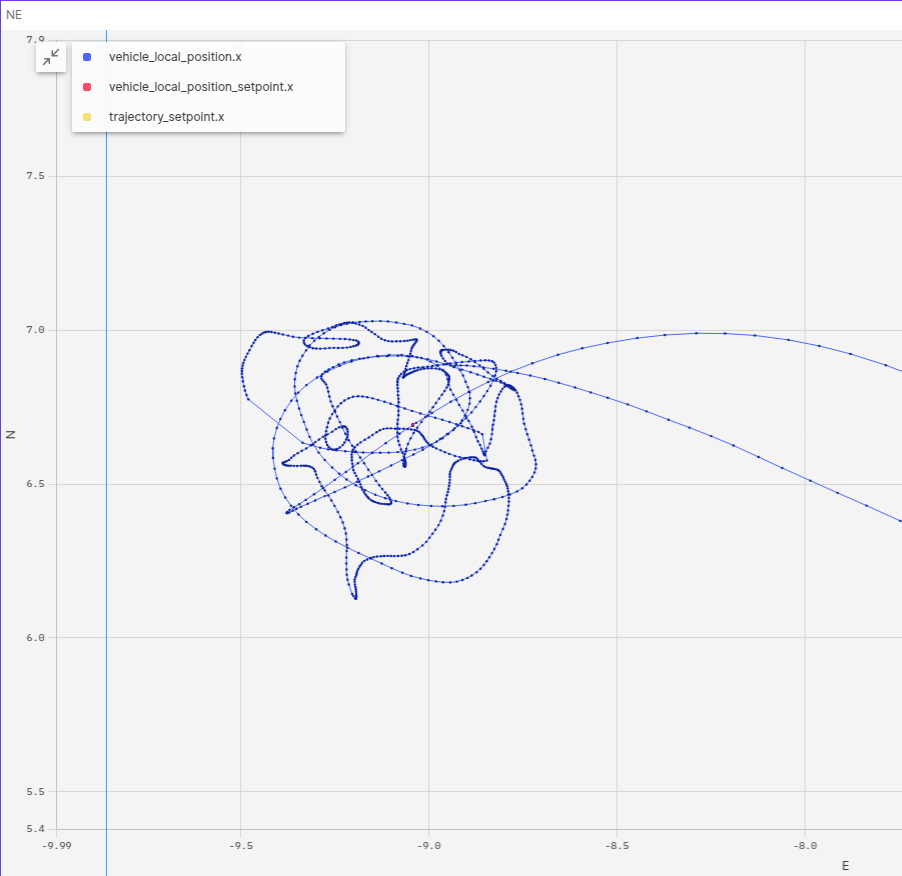
We are building a very large quadcopter (500+lbs) and are using PX4 as the autopilot. We have been experiencing an issue while attempting to yaw in place that we “wander around” the setpoint while performing the yaw maneuver. Here are some screenshots of this very consistent behavior:
The shape is always this same rough pattern as well. We are a bit perplexed as to what might be causing this issue and were wondering if anyone might have suggestions or thoughts?
Some background info:
We are using PX4 V1.13 and are locked to it for the time being.
We do not use MPC_YAW_MODE as “yaw first.” We found it had odd behavior that endangered the craft.
Instead we use stacked waypoints and timers. We make a position waypoint followed by a co-located position waypoint with the desired pre-calculated yaw toward the next waypoint as well as the hold time to get to that yaw. I would be curious if our implementation for this is sensible if we should be attempting to better leverage “yaw first.”