Hi all,
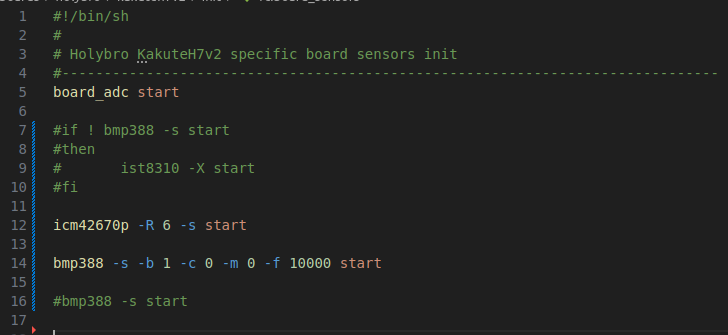
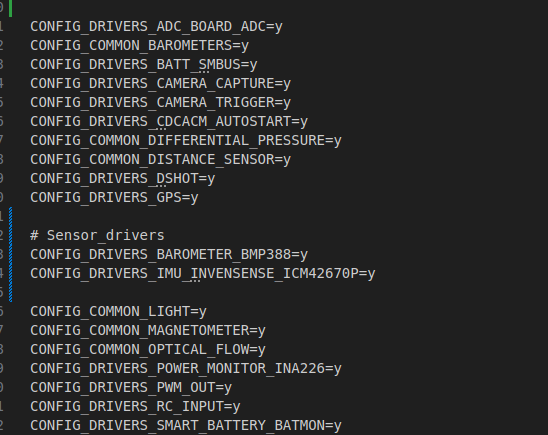
I’m currently working on building my custom firmware based on the kakuteh7v2 board. I’ve modified the board.h and rc.board_sensors files respectively, to accommodate the icm42670p ist8310 and bmp390.
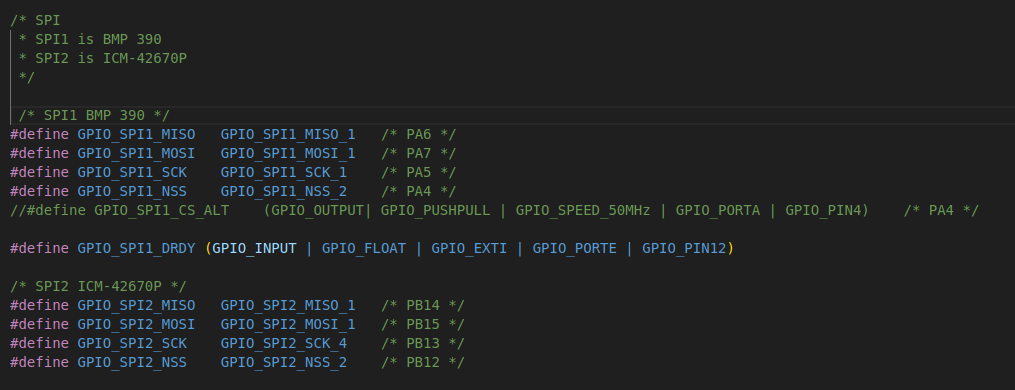
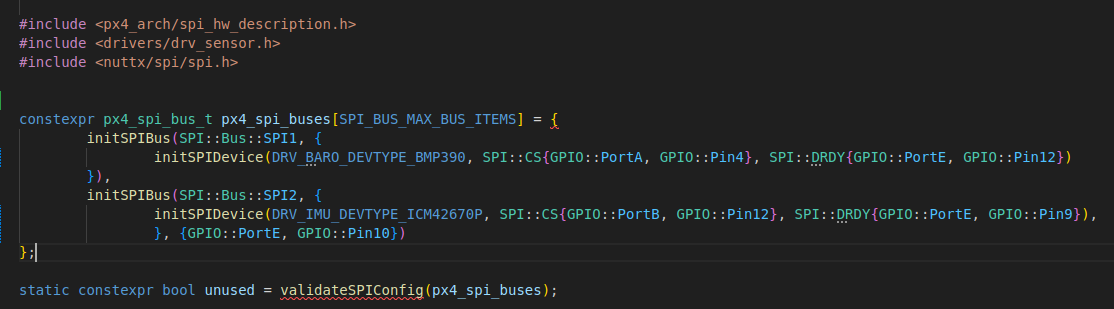
bmp390 - SPI1
icm42670p - SPI2
ist8310 - i2c
Now, my problem arises here: Both, the icm42670p and ist8310 are detected on their respective buses when I check logs, but the board just cannot find the bmp390 on the SPI1 bus. To rule out the possibility of a hardware failure, I’ve used two separate boards and even performed unit testing of the bmp390 and I’m able to communicate with the device.
I’ve pasted my logs below:
[boot] Fault Log info File No 4 Length 3177 flags:0x01 state:1
[boot] Fault Log is Armed
ERROR [PX4_MTD] failed to locate spi bus
ERROR [PX4_MTD] mtd failure: -6 bus 2 address 0 class 1
HW arch: HOLYBRO_KAKUTEH7V2
PX4 git-hash: 74570d5abe04e3a30f28c174b7cd0a34c03462e6
PX4 version: 1.16.0 c0 (17825984)
PX4 git-branch: main
OS: NuttX
OS version: Release 11.0.0 (184549631)
OS git-hash: 886acbbdb4f061e5c0ce1a76afbcfa7cb7df9849
Build datetime: Jun 27 2025 15:34:03
Build uri: localhost
Build variant: default
Toolchain: GNU GCC, 10.3.1 20210621 (release)
PX4GUID: 0006000000003537323031335107002e0030
MCU: STM32H7[4|5]xxx, rev. V
nsh: bsondump: command not found
New /fs/mtd_caldata size is:
nsh: bsondump: command not found
Board architecture defaults: /etc/init.d/rc.board_arch_defaults
Board defaults: /etc/init.d/rc.board_defaults
ERROR [param] Parameter EKF2_IMU_CONTROL not found.
Loading airframe: /etc/init.d/airframes/4050_generic_250
INFO [dataman] data manager RAM size is 68528 bytes
Board sensors: /etc/init.d/rc.board_sensors
icm42670p #0 on SPI bus 2 rotation 6
ERROR [SPI_I2C] bmp388: no instance started (no device on bus?)
ist8310 #0 on I2C bus 1 address 0xE
nsh: icm20948_i2c_passthrough: command not found
WARN [SPI_I2C] Already running on bus 1
ekf2 [604:237]
nsh: px4io: command not found
Starting Main GPS on /dev/ttyS3
Starting RC Input Driver on /dev/ttyS4
Starting MAVLink on /dev/ttyS0
INFO [mavlink] mode: Normal, data rate: 1200 B/s on /dev/ttyS0 @ 57600B
INFO [cdcacm_autostart] Starting CDC/ACM autostart
Board extras: /etc/init.d/rc.board_extras
NuttShell (NSH) NuttX-11.0.0
nsh> WARN [health_and_arming_checks] Preflight Fail: barometer 0 missing
WARN [health_and_arming_checks] Preflight Fail: barometer 0 missing
I’ve attached the link to my boards directory below. Any advice would really be appreciated.
Git link to my PX4-Autopilot/boards directory