Hello everyone, during my outdoor flight today, my plane showed serious instability in offboard mode. Observe its log, I have a few questions to ask you.
- Why is there no data for setpoint
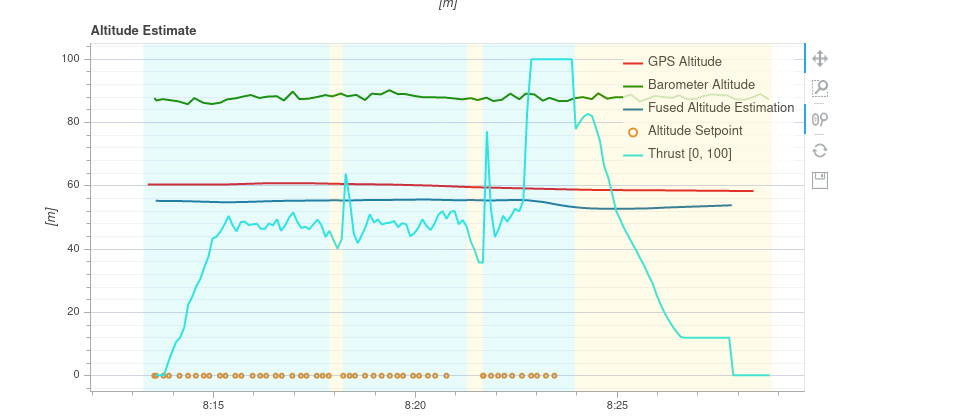
2.At that time, I was at 0 meters, but the GPS recognized it as 60 meters, and the data was very abnormal
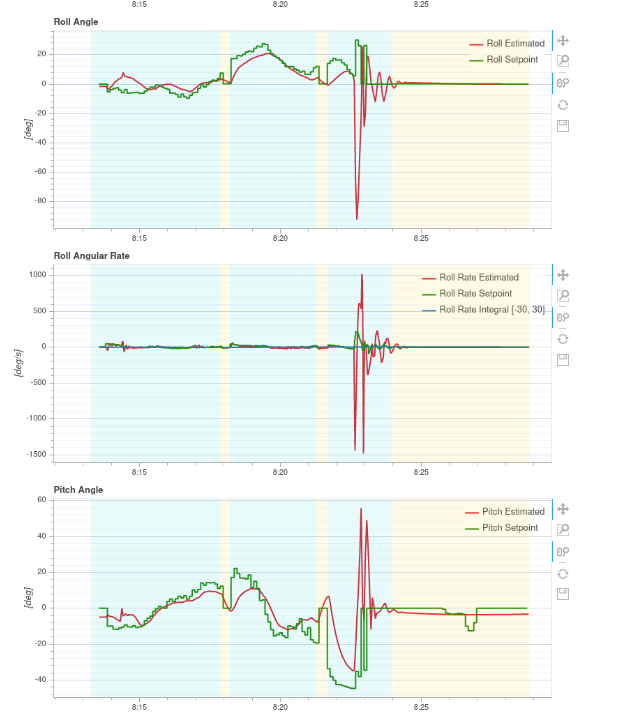
3.There was a period of time when the deviation was particularly large, but I don’t know why
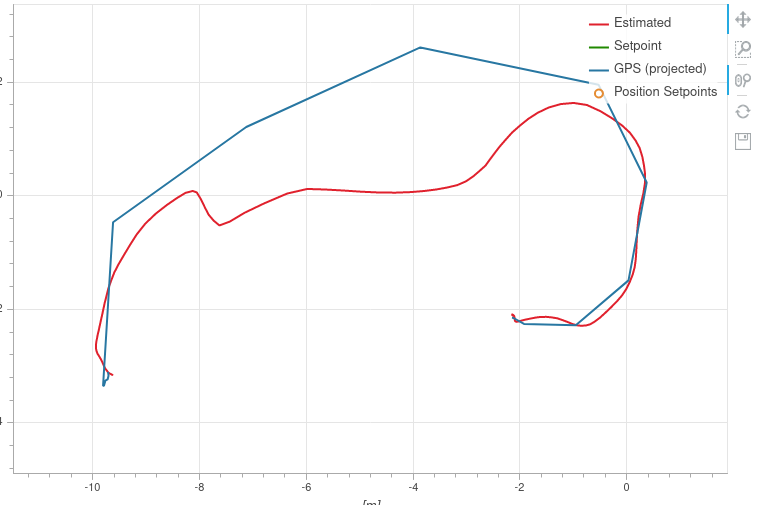
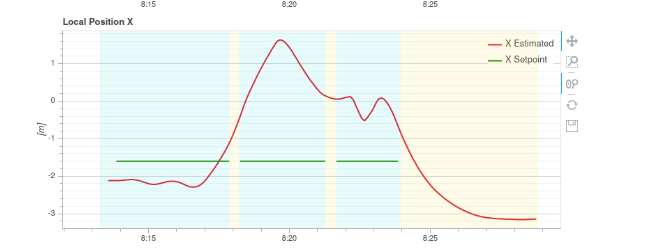
- The local coordinate system is very different from the estimated value,
5.The following is a piece of code I wrote myself, but I don’t quite understand the meaning of two mistakes on the way
Here is the script link
Script in ROS::https://drive.google.com/file/d/1qAPXHA2lFps4oteNG-zfy_OihHlUNLk3/view?usp=sharing
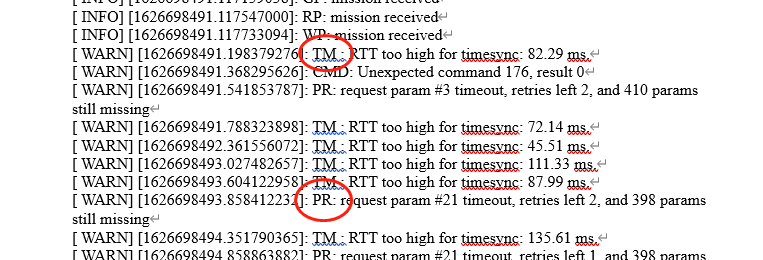
ROS terminal output::https://drive.google.com/file/d/1zsKeU7wOtDftHLhnBEMEgAugeas6BuOb/view?usp=sharing