Just a quick question. I have a 3kg long flight time quadcopter, Hover is 60%.
When perfoming a mission at 15 m/s I get slight motor saturation with 2 motors when flying into strong wind. No visible problems occur. its only when looking at the log i can see this. As soon as the drone turns away from the wind motor saturation disappears.
My question is. is it okay to have any motor saturation? I cant increase prop size. I can increase motor size, but this will reduce flight time.
If you don’t notice any instability, it should be fine. You can obviously try to go slower as well. In general your quad seems to be on the heavy side, in my experience hover should rather sit around 40%. Increasing motor size does not necessarily mean reduced flight time.
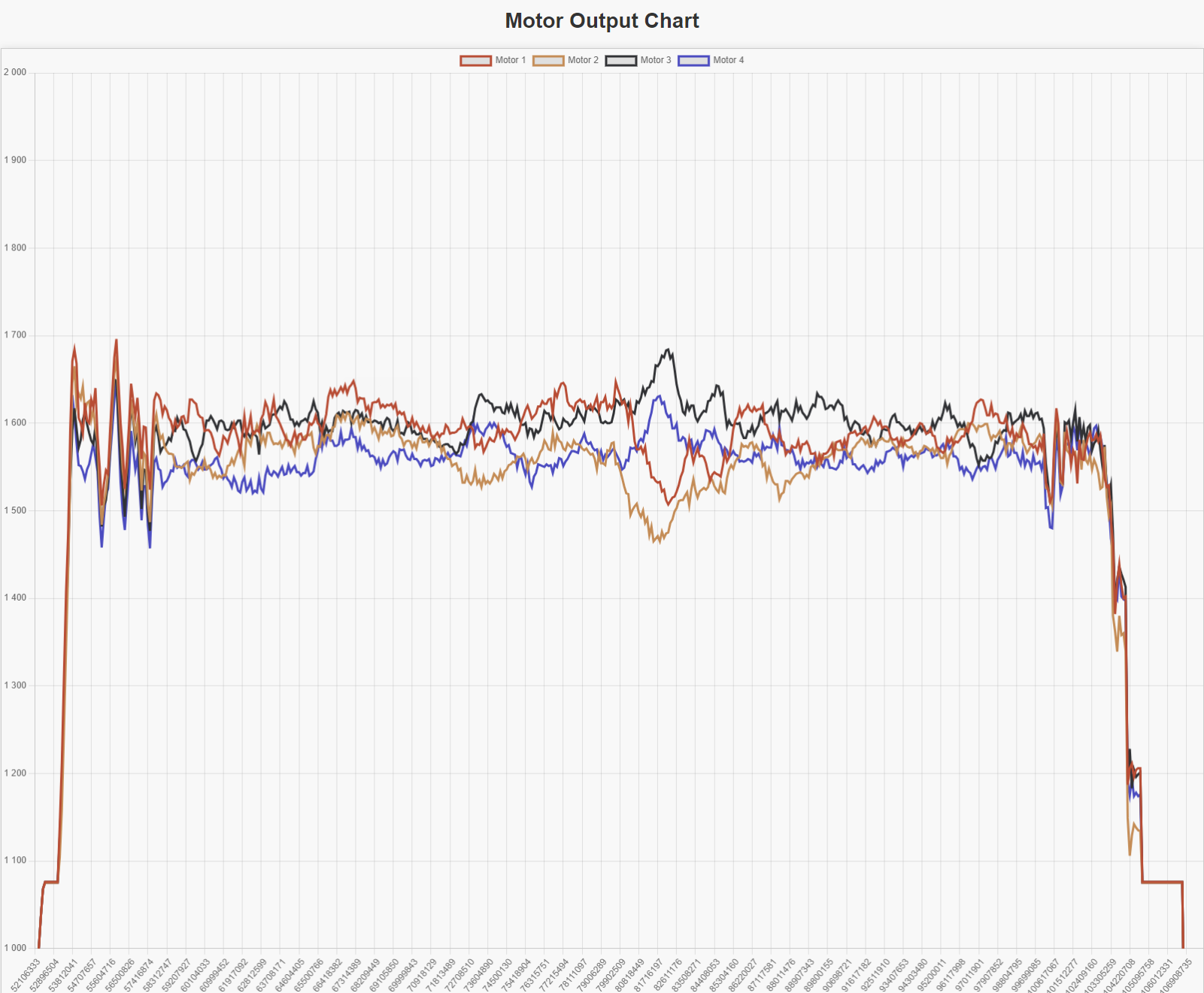
Thanks for your answer. quad is heavy as it has more than half its weight in battery. gives an amazing flight time though. here is are the motor actuator controls
just wondering if it could crash with 2 motors saturated in high wind with high speeds.
I’m a bit surprised, this does not look saturated. saturated should be around 2000 or did you change the max pwm values?
No this is a normal position mode flight. A 15 meters a second mission into strong wind. Causes motor motor saturation.
I can’t answer the question if it would crash. However in general I would recommend to put bigger motors. Motors are usually not very efficient around saturation, bigger motors might solve this problem while at the same time being more efficient.