Dear all,
While I tested 3DR Solo on Gazebo, I noticed that oscillation occurs during mission flight mode as shown in the below figure.
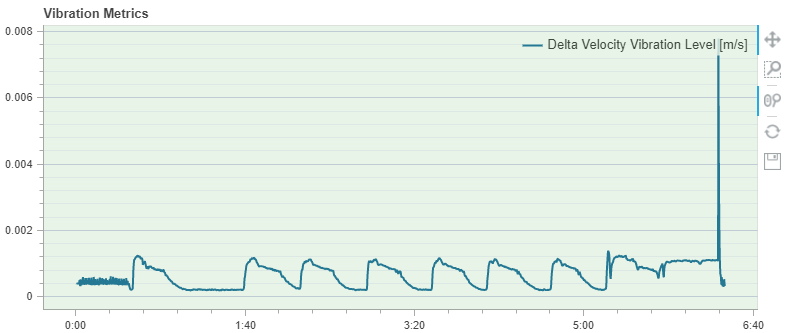
It seems likely to me that this issue is a regression because the oscillation does not occur in PX4 v1.11.0.
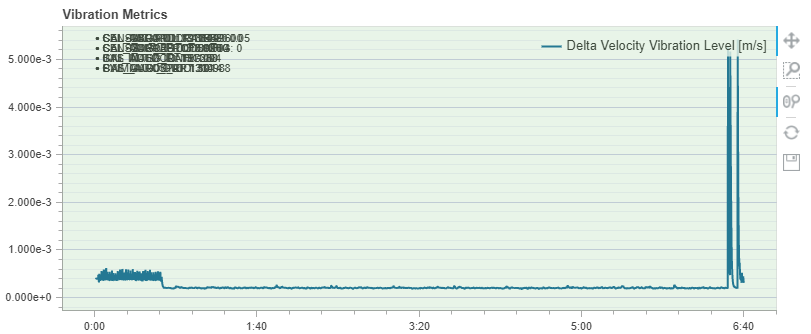
When I changed MC_ROLLRATE_P parameter value from 0.1 to 0.05, it fixed the oscillation problem.
It will be great if the default parameter value will be updated to prevent the oscillation.
FYI, I have left flight logs.
-
PX4 v1.13.0 with default parameter values: Flight Review
-
PX4 v1.13.0 with the changed MC_ROLLRATE_P parameter: Flight Review
-
PX4 v1.11.0 with default parameter values: Flight Review
Thank you!