After spending some time on figuring out that my PWM Out 5&6 were mixed up(…), I finally got my tailsitter - quite similar to the original Caipiroshka design - to hover.
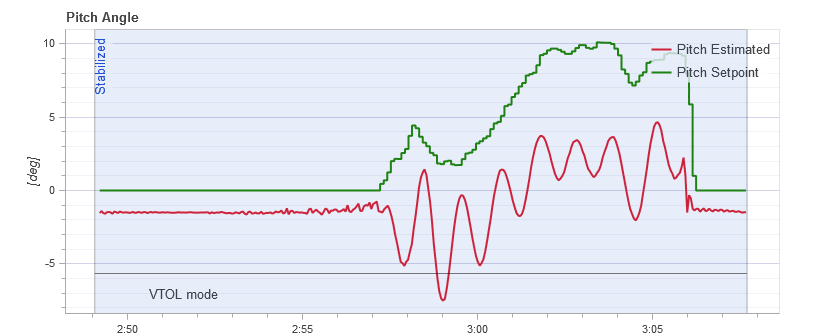
However, with the standard parameters, I get quite a strong oscillation in pitch(see picture and flight log).
I suspect the problem is the control parameters, you can try changing the pid parameter. It would be helpful if you could provide videos and corresponding logs during the flight.
(Note: You should adjust the control parameters under FW_pitch / yaw_pid instead of mc, for pitch and yaw for tailsitter)
From the log, it seems that there was about 70hz vibration during the flight.
As stated here (see section VTOL): https://docs.px4.io/v1.10/en/flight_modes/
VTOL vehicles support both modes (MC and FW). As Tim is hovering indoors, the vehicle must be in MC mode, NOT FW mode. So the relevant parameters are MC_xxx.
For avoiding drift during hover when not using GPS (e.g. STABILIZE mode, ALTITUDE mode,…) make sure that:
the COG of your vehicle is located inside or very close to the plane that is defined by your motor-rotation axes
your sensor calibration is correct (level horizon) an that your pitch/roll angles are zero when the plane is in vertical position.
I said it is not an old version, please look at the code of v1.10 or master branch
EDIT: I tried various adjustments to the mc_pid parameter on my plane, in the pitch direction. I found almost no change, and finally I found the problem … this is a painful process for me
Hello! We are using PX4 with Caipiroshka VTOL airframe. Now in v1.11.0 stable firmware it appears that MAIN5 & MAIN6 are still mixed AND Yaw (in MC mode or Roll in FW mode) is completely inverted. We had to update our main mixer with some negative values to fix it.
What was the goal of that commit?
Changing MAIN5 & MAIN6 makes Pitch inverted, not Roll. Why does it change Roll sign?