Hi, I am trying to use a single axis pitch servo to act as a gimbal on a pixhawk mro. This is my current configuration.
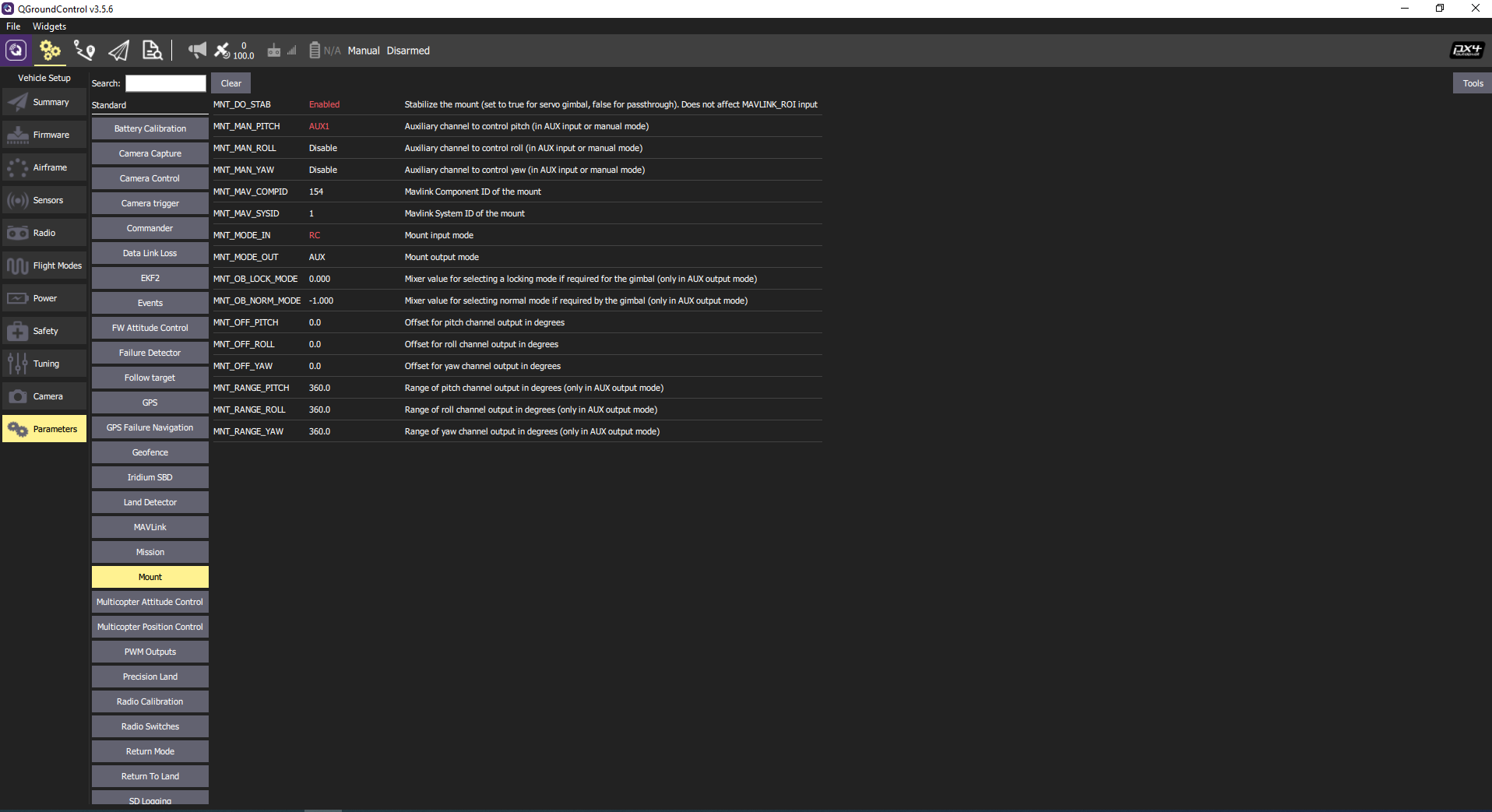
I’ve got my servo connected to AUX 1 and my ESC connected to AUX 4. If i plug in my battery the board will power up but it doesn’t appear that the servo is receiving any power. The servo doesn’t respond to me arming the system either so I am not completely sure why I can’t get a response. I am new to all of this so if there are any obvious settings that I might be missing please let me know. I was able to get the servo to respond in mission planner and Qgroundcontrol when I was using Ardupilot but I’ve had no success with PX4. Any advice is appreciated, thanks