My friends and I are trying to make a stabilizing unit. It looks like a quadcopter with propellers facing horizontally outward. The idea is to make it so that the pitch signal can make it go back and forth, roll right and left.
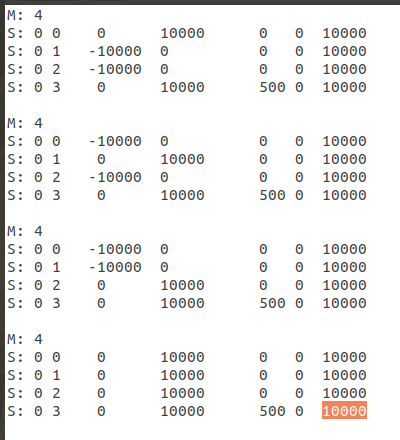
Since there’s no need for a push in both opposite directions, instead of a regular multirotor mixer, we want to use a simple mixer that filters out the negative/positive input.
it might be that the mixer isn’t loaded properly. How are you loading it? SD card? Baked in the code?
You can manually load a mixer from the MAVLink shell using: mixer load /dev/pwm_output0 /etc/mixers/<mixer-name>.mix (if baked into the FW)
or mixer load /dev/pwm_output0 /fs/microsd/etc/mixers/<mixer-name>.mix (if in the SD card)
By doing this you should get an error if it doesn’t work.
Good luck!