Hi,
I have got my own camera doing the optical flow calculation and I want to send it to the pixracer to use in loiter mode (no gps).
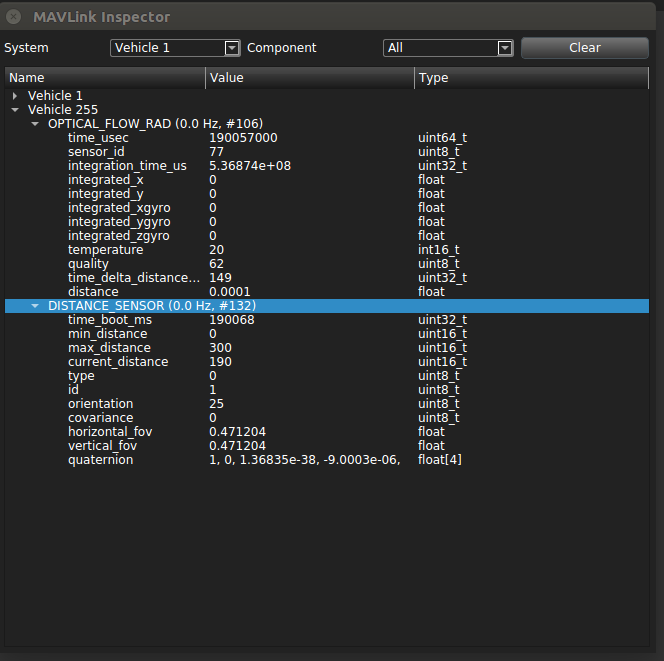
I am sending the mavlink messages to the pixracer according to this (Optical Flow · PX4 v1.9.0 User Guide) (mavlink_optical_flow_rad and mavlink_distance_sensor).
I can view the data in QGC and verified it arrives correctly.
My problem is that I can’t find the ekf2 parameter in the QGC to enable the optical flow.
Also not sure which mavlink messages shows me the output of the EKF2.
One more thing which i think is weird is that i get the message in a different vehicle (see screen shot attached).