A lot of Px4 and Ardupilot users are very familiar with the SITL (Software In The Loop) feature. Simulation is a quick, easy, and, most importantly, safe way to test changes to flight code before attempting to fly in the real world. It is also an excellent way to start flying with the ArduPilot flight stack when you still need a vehicle to experiment with.
With dronesim.xyz, you can interact with a computer-modeled vehicle just as you might with an actual vehicle. This cloud simulator, designed for ease of use, spins up an Ardupilot or PX4(coming soon!) software in the loop simulation, allowing you to control the vehicle in a simulated ‘world’ using any Mavlink ground stations such as QGroundControl, MissionPlanner, python scripts or a gamepad.
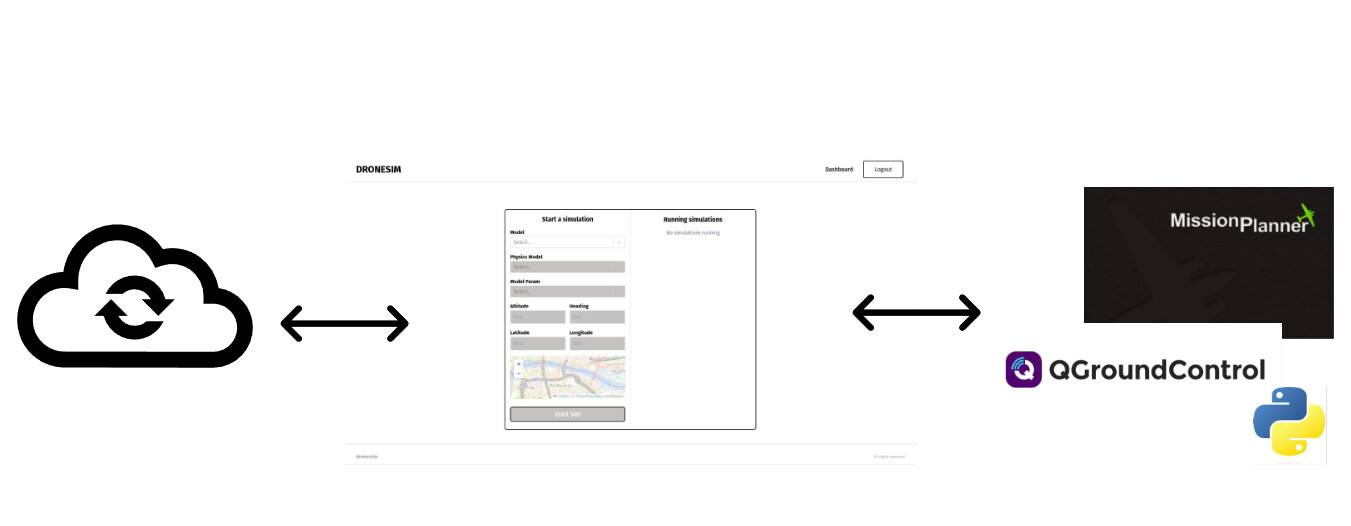
Start and stop a simulation with just a few clicks (no downloading required!!):
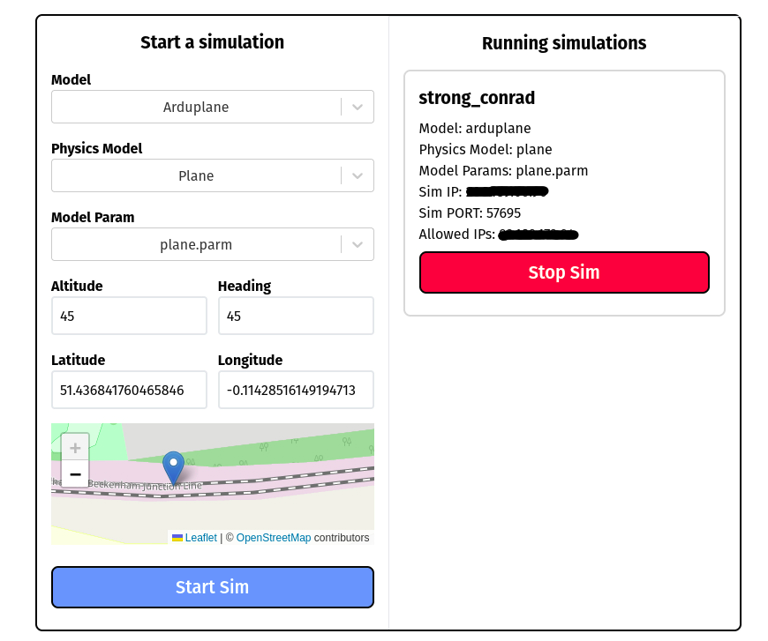
Set up the simulation instance with a few clicks and connect to it on the generated Sim IP and TCP port !!
Have a look at the quick start guide here:
Upcoming features to watch out for!
We are constantly looking out for user feedback and releasing new features for improving your simulation experience.
- Version control for Px4, arduplane and arducopter (coming this week!)
- Mavlink routing for mulitple for ports.
- Support for Xplane, Gazebo and airsim.
- Web based visualization for flight planning, situational awareness.
Help us improve
The website is now live and free to use. Currently, It is possible to spin up two instances per user. Your feedback is not just valuable, it’s crucial to us. We want to use it to help serve you better and improve our cloud simulator.
First 200 users will be eligible for a special discount at the end of beta!
Fill in this form to send us your feedback and experience:
Happy simulations!