I have upgraded the PX4 firmware to integrate the TFRPM01 RPM sensor, as described in the ThunderFly Tachometer documentation.
My project aims to increase the RPM logging rate to 50 Hz to better capture fire plume interactions during flights. These interactions typically last about 4 seconds, but the current ESC logging rate of 10 Hz is insufficient to resolve the necessary details (A castle creations ESC). I have successfully upgraded and compiled the PX4 firmware to increase the logging rate of the TFRPM01 to 50 Hz.
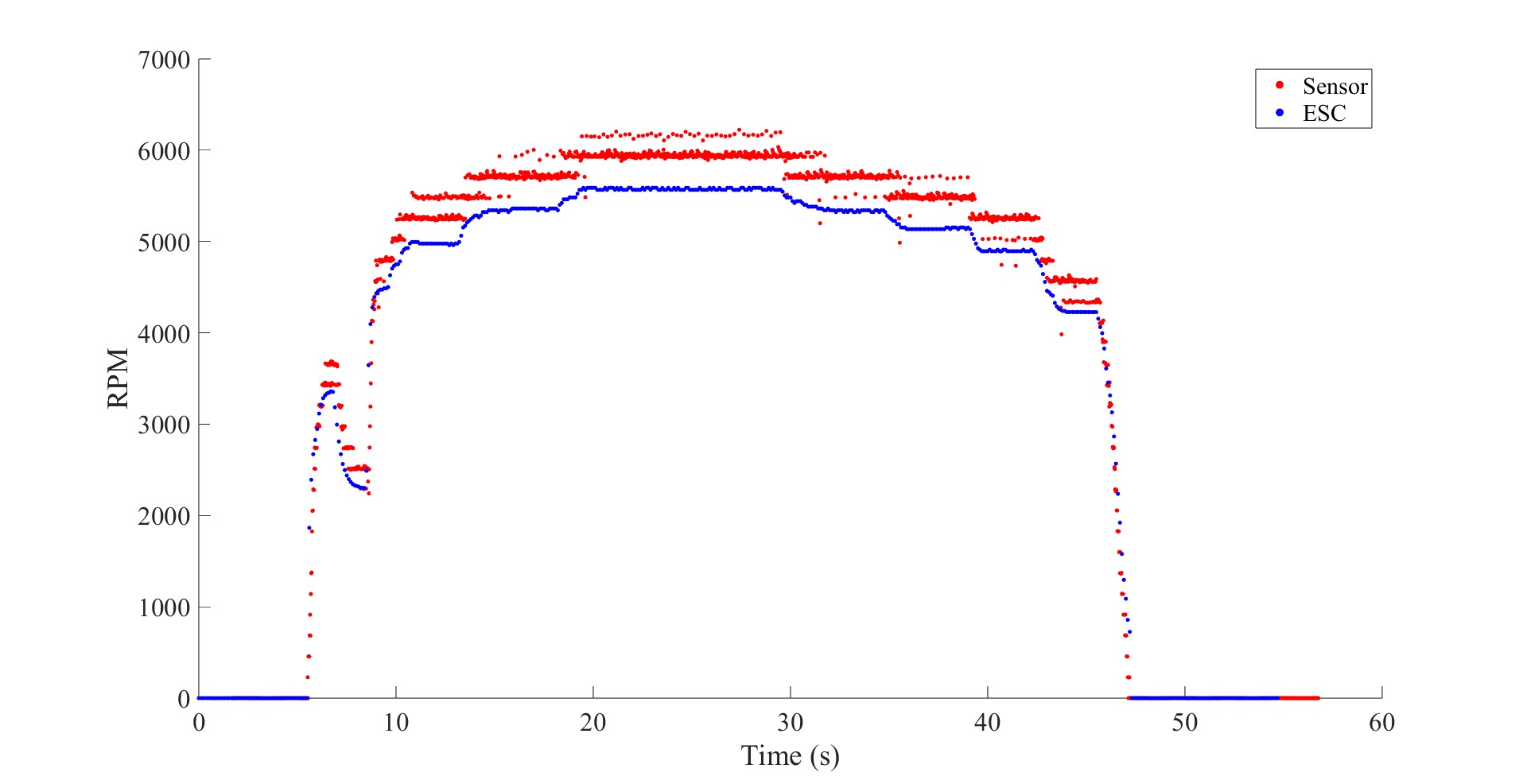
Below, the results compare the TFRPM01 sensor data (red) with the ESC data (blue). The sensor demonstrates a clear advantage during rapid RC throttle changes, capturing more dynamic transitions with accurate data points. However, during slower maneuvers—such as the curve shown in the enlarged section—the ESC data appears to represent the curve more smoothly. I understand that error resolution decreases with higher logging rates, but I’m curious why the TFRPM01 data tends to cluster around a specific value during the throttle curve.
Does anyone have insights or suggestions for explaining these results?