This thread is for discussion about tuning the PX4 flight stack for FPV racing multicopters.
I’ll start with the current tuning for my 3S Spedix S250AQ with a Pixracer FC.
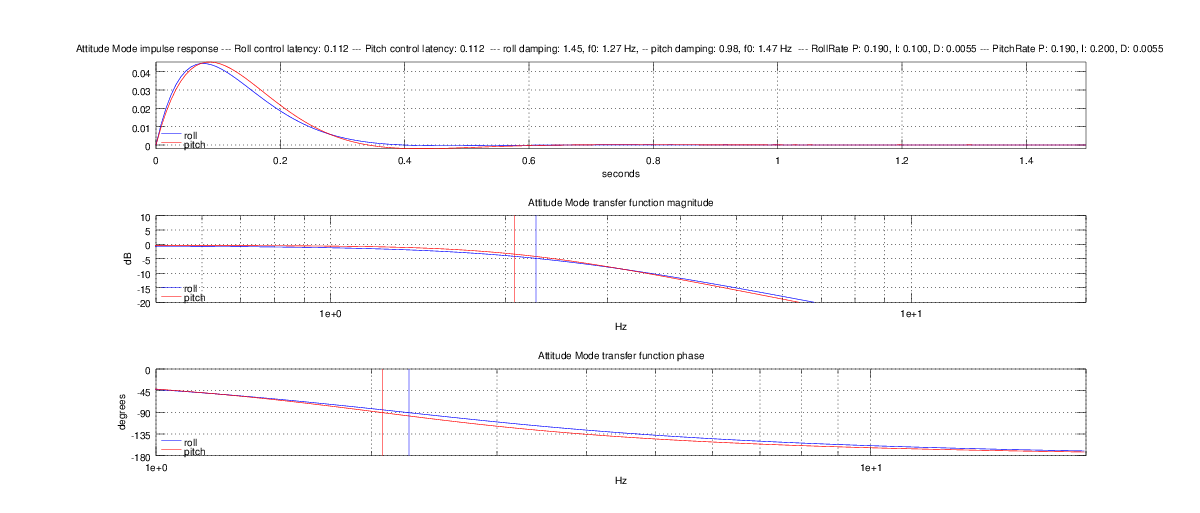
MC_PITCHRATE_D 0.0055
MC_PITCHRATE_FF 0.0
MC_PITCHRATE_I 0.2
MC_PITCHRATE_MAX 720.0
MC_PITCHRATE_P 0.19
MC_PITCH_P 8.0
MC_RATT_TH 0.8
MC_ROLLRATE_D 0.0055
MC_ROLLRATE_FF 0.0
MC_ROLLRATE_I 0.1
MC_ROLLRATE_MAX 720.0
MC_ROLLRATE_P 0.19
MC_ROLL_P 8.0
MC_TPA_BREAK 0.4
MC_TPA_SLOPE 1.5
MC_YAWRATE_D 0.0
MC_YAWRATE_FF 0.0
MC_YAWRATE_I 0.1
MC_YAWRATE_MAX 220.0
MC_YAWRATE_P 0.2
MC_YAW_FF 0.5
MC_YAW_P 4.0
You’ll notice the I gains are fairly high; I find that MC_PITCHRATE_I must be especially high for the quad to feel “locked in” on the pitch axis in ACRO mode. It is also necessary to run fairly high P gains to lock in the attitude when in ACRO mode. In STABILIZE mode, these gains can be reduced without loss of attitude accuracy because the controller is using the IMU’s estimate of orientation in addition to the gyro signals.
I’m using a Blade Vortex 250 Pro as my reference vehicle for performance comparisons, since Horizon Hobbies claims that it is delivered pre-tuned and race-ready ![]() I’m flying it and my S250 LOS in ACRO mode to compare the “feel” of the two racers and judge the quality of my PX4/Pixracer setup/tuning. I’ll be doing the same in FPV, once I get a suitable test course set up.
I’m flying it and my S250 LOS in ACRO mode to compare the “feel” of the two racers and judge the quality of my PX4/Pixracer setup/tuning. I’ll be doing the same in FPV, once I get a suitable test course set up.