Hello Benja and thanks for repply !
Ok I understant now ! But i have read this :
Blockquote ###bkueng commented Feb 14, 2023
I haven’t thought it through completely but along the lines:
So this is wrong ? For now no possibility to do this ? I guess is also impossible ROS control servo by PWM with actuator_outputs ?
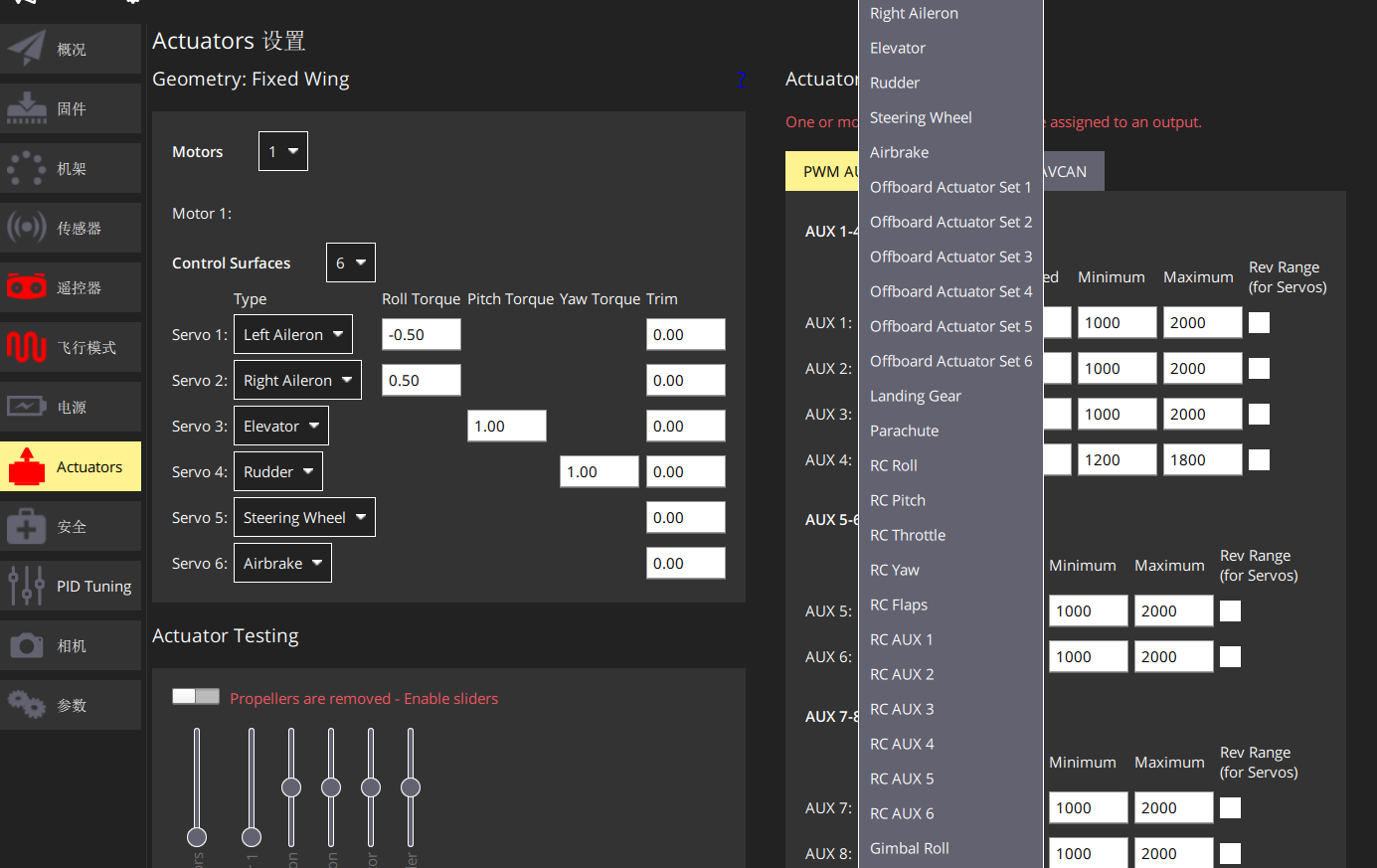
I think, now i have made a correct servo mixing so now i try control my servo with vehicle_torque_setpoint.
0 to -1 the left sevo is actionned from 0 to 2 turn and 0 to 1 the right servo move 0 to 2 turns. It work well with my rc transmitter the stick do exactly the servo movement I want !
I have made a python node who publish in /fmu/in/vehicle_torque_setpoint.
I put the pixhawk in offboard mode and i send commands but servo don’t move 
Where i’m wrong ?
Should i publish directly on /fmu/out/vehicle_torque_setpoint ?
This node subscribe to a px4 a topic to have the px4 timestamp and use it to timestamp the command i send. Is it the good way to do this ?
Here is the output of my node :
timestamp: 1677770483288374
timestamp_sample: 1677770483288374
xyz:
- 0.20000000298023224
- 0.6000000238418579
- 0.0
---
timestamp: 1677770483386081
timestamp_sample: 1677770483386081
xyz:
- 0.20000000298023224
- 0.6000000238418579
- 0.0
---
timestamp: 1677770483488759
timestamp_sample: 1677770483488759
xyz:
- 0.0
- 0.0
- 0.0
---
It look like the original /fmu/out/vehicle_torque_setpoint when i move my rc stick! So i would love this node move my servo now !
Another question about the timestamp, sometimes i lost some px4 message and the command is published with the same timestamp for 2 or 3 second. This will affect the command?
Px4 will do the action if the timestamp is in the past ?
Also I have really strange problems, sometimes I lost totally the connexion between ROS and px4, the px4 topics disapears without doing anythink !?!
I don’t know why ?! I have to restart the pixhawk, and unplug- plug the ethernet cable form the v6x to the raspbery. The topics reappear after a very long time ! perhaps 2 or 3 minutes before i can see the px4 topics in ros ? Is it normal ? Is xrce agent/client problem ? Is there logs i can see to identify the problem ?
When i do my first test it was really fast, if i reboot my pixhawk, i can see topics in less than 20 s ! Now it take 3 minutes !!
Thaks