you need to edit dds_topoic.yaml …
uXRCE-DDS (PX4-ROS 2/DDS Bridge) | PX4 User Guide (main) here is the complete documentation.
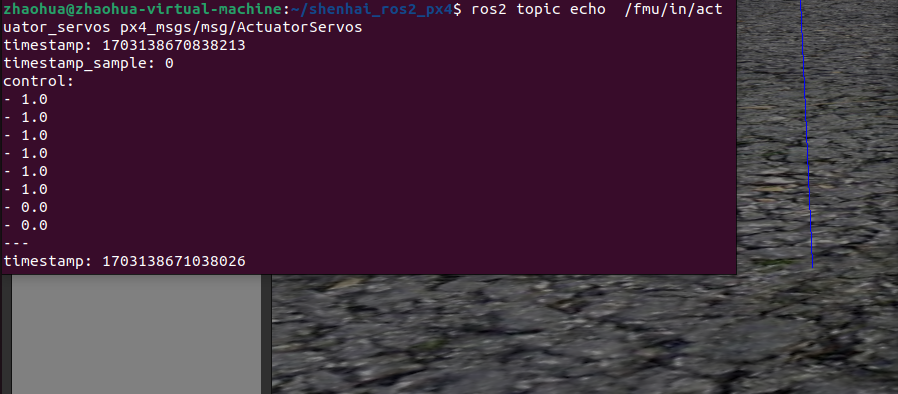
you can add /fmu/in/actuator_servo and other topics you think you need.
you need to edit dds_topoic.yaml …
uXRCE-DDS (PX4-ROS 2/DDS Bridge) | PX4 User Guide (main) here is the complete documentation.
you can add /fmu/in/actuator_servo and other topics you think you need.
Thank you very much. You can see in the screenshot .I have published /fmu/in/actuator_servo topic。But the PWM values I see in QGC mavlink Inspector is not what Ihave published。
Hello,
I am controling Servo from actuator_servos topic in offboard mode and it is also working.
But the problem I am facing is when I send 1 (90 degree) servo rotates only 60-70 degree. same for the -1.
I wanted to rotate servo complete 90 degree in gazebo.
I am using gazebo garden with custom SITL.
How can I solve this issue??
@rmayur
You need to change the maximum and minimum PWM values of the servo port at QGC .Because the control value of actutor_dervos is normalized.