Hi all,
Trying to make our first takeoff with a newly assembled PX4 hexacopter, it flips over everytime about 1 sec after takeoff. We have confirmed motor rotation and propellers are turning in the right direction using the motor test function of QGC. We have also validated that every motor is plugged into the right port of the controller. Here’s a log showing one of three identical takeoff and crash:
https://review.px4.io/plot_app?log=116407e0-f3de-4380-b752-1937f6ade2ab
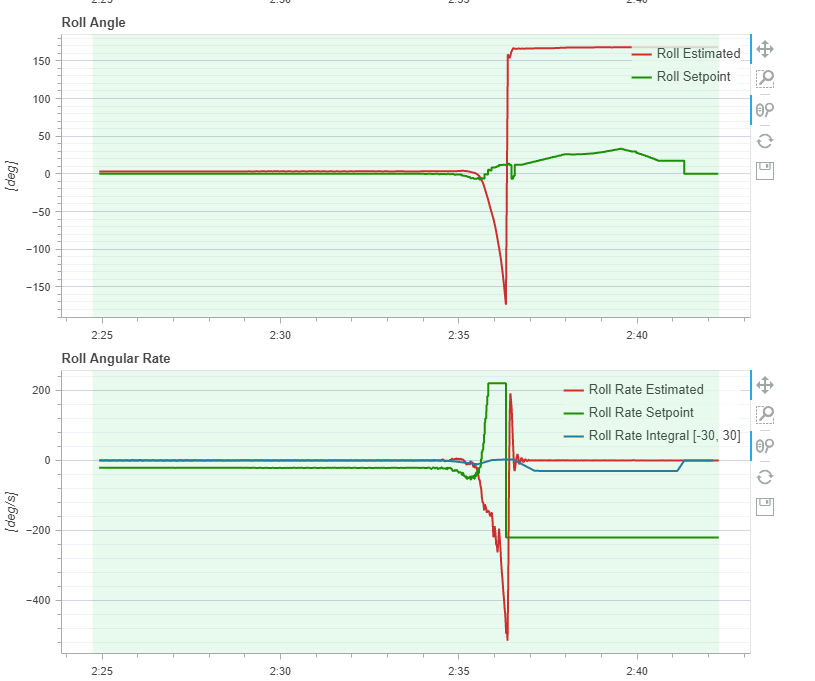
Takeoffs were done in position mode and only the throttle stick is pushed, no input for yaw/pitch/roll. It looks like the roll and pitch estimates are inverted relative to the setpoints. What could this possibly mean?
Thanks!