Hello all,
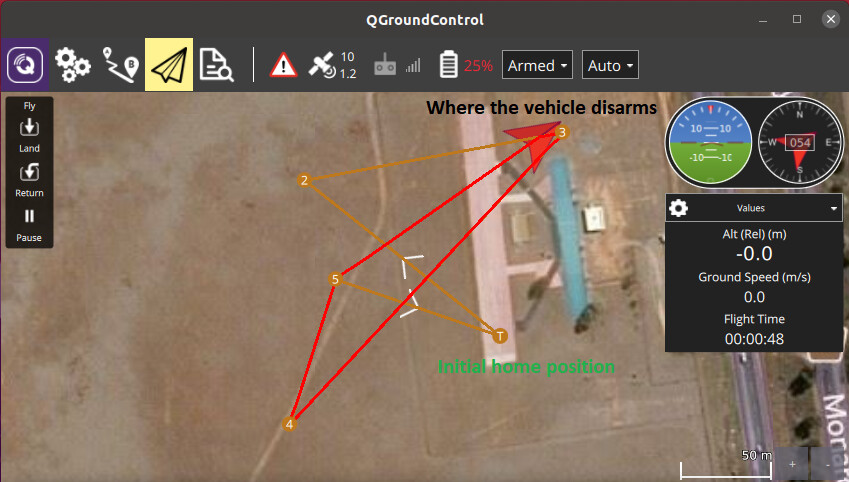
In a figure in the below, I could not restore the initial home position after I disarmed and armed the vehicle near from the waypoint 3. The reason is that PX4 and ArduPilot set the actual home position where the vehicle armed. However, I want to keep using the initial home position even though the vehicle was armed at different location.
I know that I can set the home position by sending a MAVLink message (MAV_CMD_DO_SET_HOME).
But, is there any way to restore an initial home position on QGC? Thanks!