Abstract: Lidar has the characteristics of long detection distance and strong robustness. In this paper, lidar is used as the sensor of UAV, and the traditional vector field histogram algorithm (VFH) is improved. Based on the lidar data, an improved adaptive threshold strategy is proposed. The threshold evaluation function is used to comprehensively evaluate each group of thresholds in the optional range, so that the UAV can select the threshold suitable for the current situation. The experimental results show that in the environment with obstacles, the UAV can find a shorter path and a faster time, safely reach the target point without collision, and the obstacle avoidance accuracy can reach 96.7%, and the real-time feedback control of uav attitude also meets the requirements of obstacle avoidance.
Key words: Lidar; Unmanned aerial vehicle (uav); VFH; histogram
Obstacle avoidance has always been a hot research issue of UAV. Nowadays, there are many mature algorithms for local obstacle avoidance, such as artificial potential field method, grid method, viewable method, etc. Each algorithm has different advantages and disadvantages. Among them, vector field histogram method (VFH) shows good performance in robot obstacle avoidance. VFH is an improved robot navigation algorithm based on artificial potential field method, which is widely used in real-time obstacle avoidance of robots. VFH algorithm solves the problem that VFF of virtual potential field method is easy to fall into local minimum value and narrow channel has oscillation. However, this algorithm does not consider the size, dynamics and kinematics characteristics of the robot. In order to improve the shortcomings of THE VFH algorithm, the improved VFH* algorithm was proposed in reference 4. In addition, many researchers proposed the VFH* algorithm to learn the obstacle avoidance in dynamic environment considering the existing speed of obstacles. Reference 6 designed a local cycle escape mechanism based on dynamic threshold to overcome the problems caused by fixed threshold. Through analysis, it can be found that the proposed algorithm is related to the equipment at that time, and the low accuracy of the equipment is not completely reliable for obstacle detection, so various data processing methods have to be put forward. Nowadays, the accuracy of lidar can meet the requirements. In this paper, an adaptive threshold strategy is implemented by using two-dimensional lidar as sensor and improved VFH algorithm, which improves the obstacle avoidance performance of UAV during flight.
- Characteristics of lidar
Lidar is a combination of laser technology and radar technology, using laser to send light wave signals for measurement, lidar works in a similar way to microwave radar. Compared with the traditional detection technology, lidar has the characteristics of high precision and strong anti-interference ability.
- Improved VFH algorithm
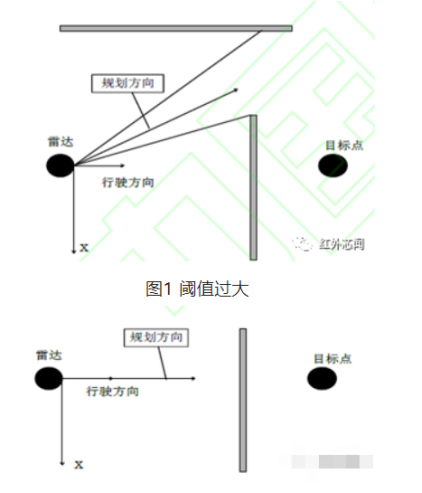
The data collected by lidar is the distance between lidar and obstacles in polar coordinates. VFH algorithm is used to quantify the obstacles around the UAV and assign different obstacle intensity values according to different obstacle distances. The uav chooses its direction of movement within a range less than a defined threshold. However, the determination of threshold value needs to be determined according to the actual flight status of UAV, and there is no unified method. As shown in Figure 1, when the threshold is too large, some paths that can be passed will be ignored, so that the UAV cannot find the road and thus cannot find the target point. As shown in Figure 2, if the threshold is too small, the UAV will not be able to find the obstacles in front and have no time to avoid the collision.