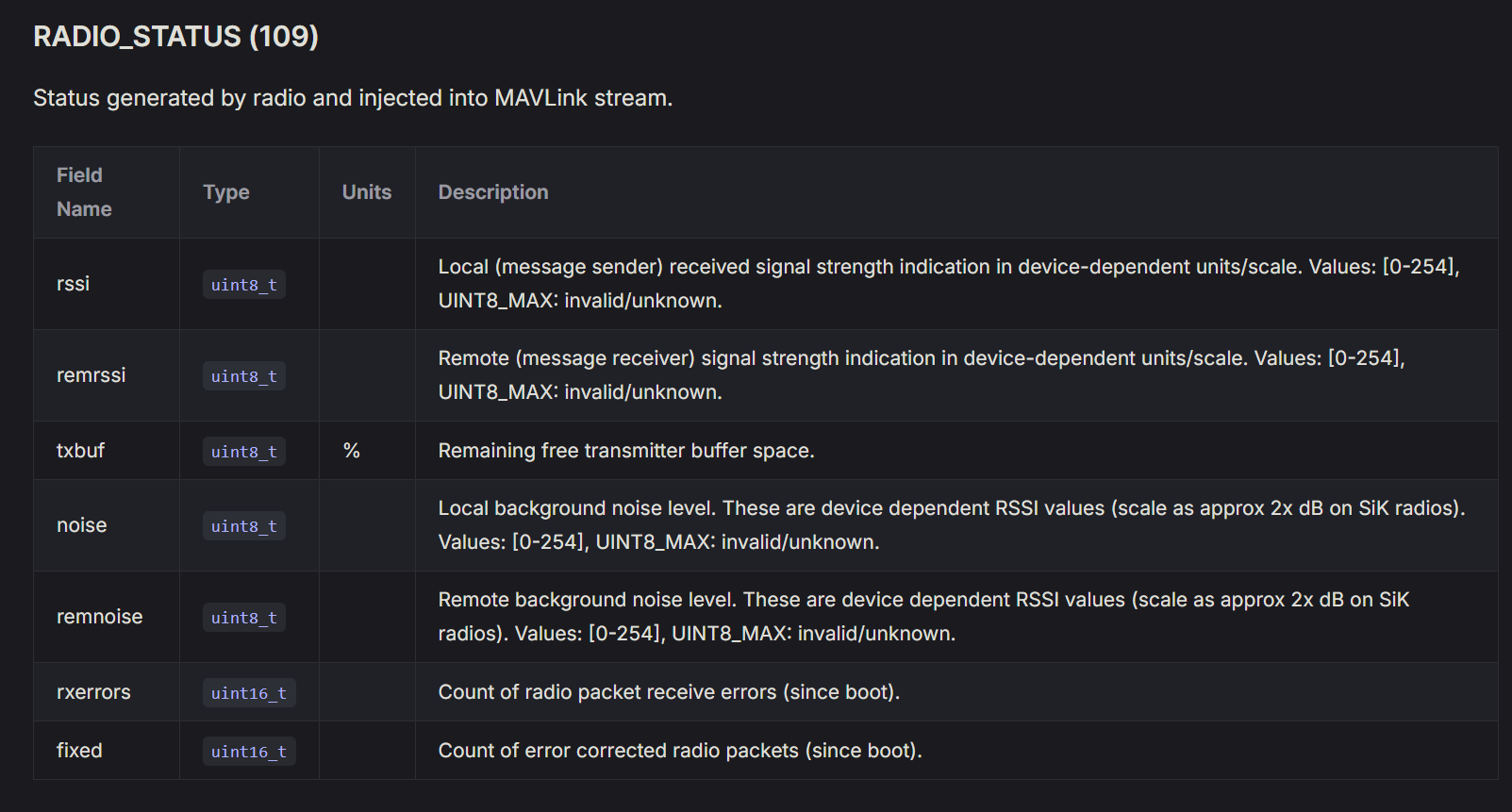
Hi all, I just started with the LoRa telemetry radios from Microair. The MAVLink documentation states that SiK radios inject RADIO_STATUS messages which holds the rssi
But I did not see this message stream in QGC. Is there a way to enable this message? Alternatively, are there any other ways to measure the performance/rssi?
Hi Julian, thank you for the reply. I’m not sure about compatibility, but the message does not appear in MAVLink Inspector. There’s LINK_NODE_STATUS but it doesn’t say too much especially about rssi. Is there a way to hack the radio to inject it?
My telemetry radio supports the RADIO_STATUS (ID 109) MAVLink message.
However, in my custom GCS I cannot see RADIO_STATUS by default.
Behavior I see:
If I connect to the drone with Skydroid GCS first → I can see RADIO_STATUS in Skydroid.
If I then close Skydroid GCS and connect my custom GCS → I still receive RADIO_STATUS normally.
But if I reboot the drone and connect only my custom GCS → I no longer receive RADIO_STATUS.
It seems Skydroid GCS is doing something during the initial connection that causes the radio to start injecting RADIO_STATUS messages into the MAVLink stream. My GCS is not doing that yet.
Has anyone else faced this? What handshake or initial packet do I need to send to trigger RADIO_STATUS injection right after connection, without having to use Skydroid first?