Hi,
as I mentioned in the title I would like to know how to access uORBs on a companion computer which is linked via mavros.
Long story short - I would like to see the current actuator Outputs while I’am flying for some custom physical/mathematical model. So I can calculate the current forces of each rotor. I know there is a promising uLOG/Topic about actuator_outputs but while I’m a flying I have nothing similar as a rostopic.
@mrivi
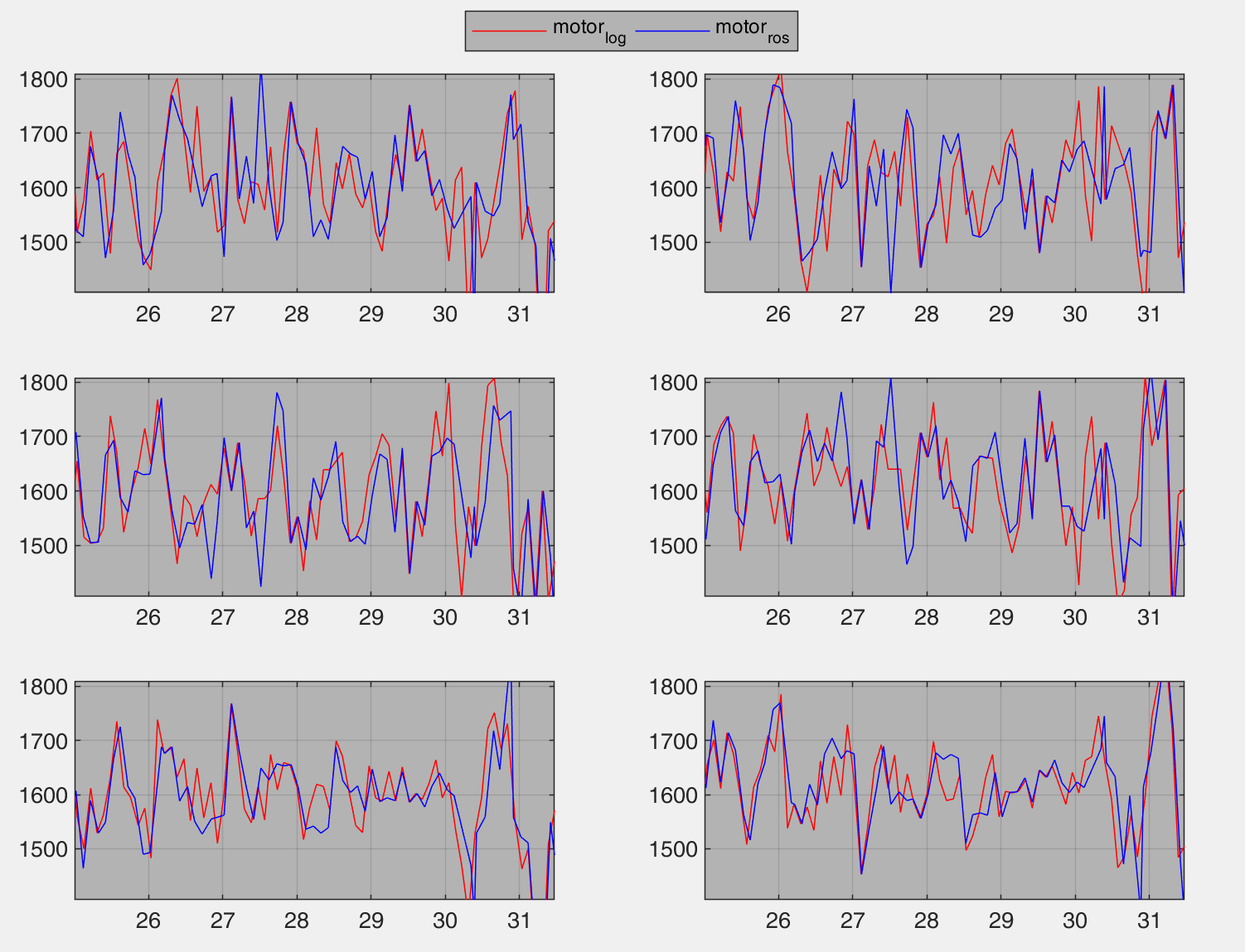
I had a look at the mavros/rc_io and I realized it is already a published Topic in my Basic configuration - and yeah thanks a lot for your advice. Overall the Logdata and the Rosdata are quite similar, but if I zoom in I see some differences. In the Picture below the datasets are evaluated in matlab and searched for the arming-rc-input which will result in the px4 arming and also starting the ulog on arming - so yeah let’s call it a pseudo sync along their timestamps …
so I wonder about the difference - do you know anything about it?
Maybe some kind of dataconversion on mavlink side?
Maybe noise while transmitting?
Maybe still some bad allignment on my side of rosbag-csv and ulog-csv in matlab…
One difference is the message rate: the uORB logging rate is 100Hz while the rate at which the mavlink message is sent from the Firmware is 10Hz
Mavros does a 1:1 copy of the values received from mavlink into a ros message.