Hey @JulianOes,
so it was a while back when I asked this Question and you referred to @mhkabir and @TSC21.
Overall I feel like I did not too bad with my attempt to sync the datasets. I tracked the mavros/rc/in arm_channel and used a static Offset correction of (mavros.time-0.25)~approx~ulog.time.
As you can see below it is working quite well - of course if I zoom it Looks not as good as in the overview right now.
(The image shows the x-position of my drone according to the logfile and rosbag during Position mode)

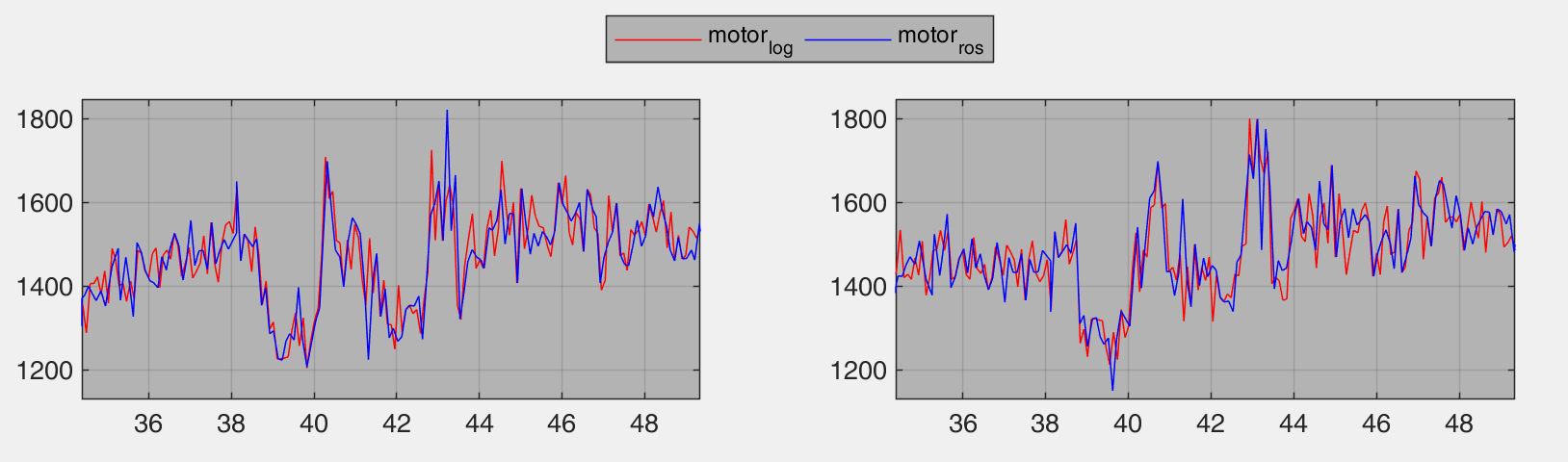
Recently I wanted to have a look at the Motor Outputs and Keep track of them via mavros - which seems to be working while I track the mavros/rc/out Topic - But I would like to know About the value differences between the logfiles and the rosdata (see my current Topic - link at the end of this post …). I know Maybe the datasets are not perfectly alligned on the time axis but even though the y-values of the Graphs = Motor Outputs are not the same.
So now to my Questions:
-
Anything new about correctly syncing rosbag and ulog?
-
What is the issue for the value differences? data_conversion? noise? And can they be improved?
-
If the internal uOrb Topic is saved in the uLog and also transferred via mavlink to mavros/rc/out is there a known delay or do I need the evaluate this on my own by tracking a Signal - and which one would you recommend? An arm command via an offboard command and calc the difference between ros time stamp of the start command and the ros timestamp of Motor value changes?
Kind regards,
Mark